



















90
Adjustment of the output torque (current) of the motor
4.4.3 Slip compensation (Pr. 245 to Pr. 247)
<V/ F><S MFVC>
⋅ Slip compensation is validated when the motor rated slip calculated by the following formula is set in Pr. 245. Slip
compensation is not used when Pr. 245 = "0" or "9999".
The inverter output current may be used to assume motor slip to keep the motor speed constant.
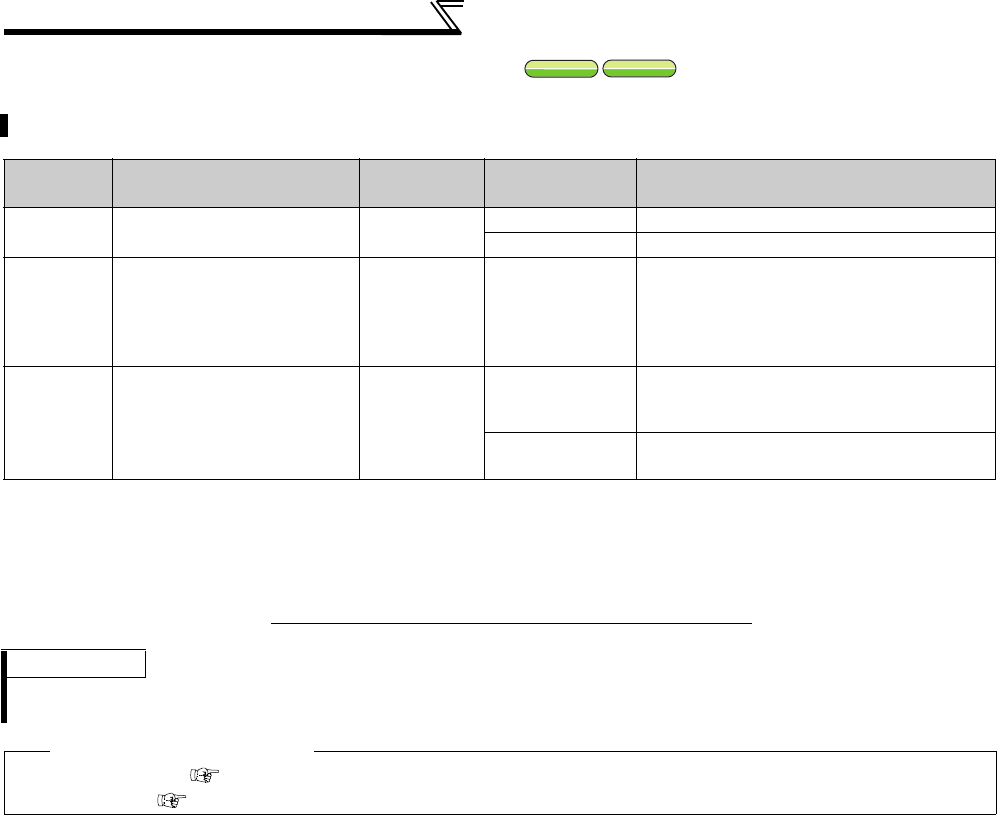
Parameter
Number
Name Initial Value Setting Range Description
245 Rated slip 9999
0.01 to 50% Used to set the rated motor slip.
0, 9999 No slip compensation
246
Slip compensation time
constant
0.5s 0.01 to 10s
Used to set the slip compensation response
time. When the value is made smaller,
response will be faster. However, as load
inertia is greater, a regenerative overvoltage
(E.OV) fault is more liable to occur.
247
Constant-power range slip
compensation selection
9999
0
Slip compensation is not made in the
constant power range (frequency range
above the frequency set in Pr. 3)
9999
Slip compensation is made in the constant
power range.
The above parameters can be set when Pr. 160 User group read selection = "0". (Refer to page 201)
Rated slip =
Synchronous speed at base frequency - rated speed
× 100[%]
Synchronous speed at base frequency
REMARKS
When performing slip compensation, the output frequency may become greater than the set frequency. Set the Pr. 1 Maximum
frequency value a little higher than the set frequency.
♦ Parameters referred to ♦
Pr. 1 Maximum frequency Refer to page 96
Pr. 3 Base frequency Refer to page 98
V/F
V/F
V/F
S
MFVC
S
MFVC
S
MFVC