



















Chapter 4 Explanation of Functions
4 - 104
4.3.11 Home search function
The home search function allows you to make the inverter locate
the motor shaft at a specified position. You can use this function,
for example, to stop a metal-cutting machine to replace the tool
attached to the main spindle. When using the home search
function, be sure to insert a reference point pulse signal between
the EZP pulse and EZN pulse signals from the encoder.
Item Function code Data or range of data Description
Encoder pulse-per-revolution
(PPR) setting
P011
128. to 9999. or 1000 to 6553
(10000 to 65535) (pulses)
Home search stop position
setting
P014 0. to 4095.
Home search speed setting P015
0.00 to 99.99 or 100.0 to 120.0
(Hz)
See Note 1.
P016 00
Home search direction setting
01
Home search completion range
setting
P017
0. to 9999. or 1000 (10000)
(pulses)
Home search completion delay
time setting
P018 0.00 to 9.99 (s)
Position loop gain setting P023 0.00 to 99.99 or 100.0 (rad/s)
Terminal function C001 to C008 45
Terminal function C021 to C025 ORT: Orientation
Alarm relay terminal function C026
23
POK: Positioning end signal
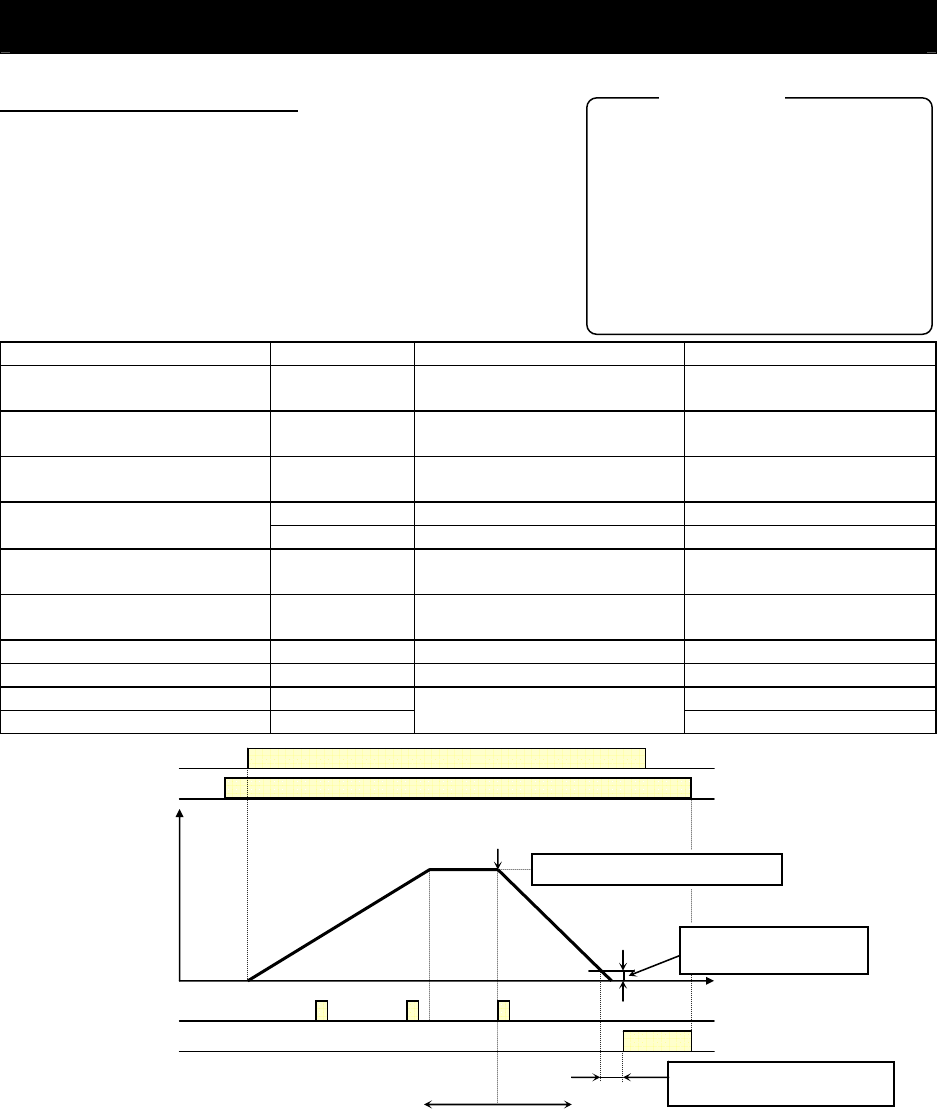
1) When the operation command is turned on with the ORT terminal turned on, the inverter accelerates the
motor to the speed specified by the home search speed setting (P015), and then runs the motor at a
constant speed. (If the motor is already running, the inverter changes the speed to the home search
speed when the ORT terminal is turned on.)
2) After the home search speed is reached, the inverter switches to position control mode when it detects
the first Z pulse.
3) The inverter performs position control by rotating the motor by one turn as the target amount from the
position specified by the home search stop position setting (P014) when running the motor forward, or
by two turns as the target amount from the home search stop position (P014) when running the motor
reversely. In this case, the shorter the deceleration time, the larger the position loop gain setting (P023)
becomes. (This deceleration time does not follow the deceleration time setting.)
4) The inverter outputs a POK signal when the time specified by the home search completion delay time
setting (P018) elapses after the remaining number of pulses enters the range specified by the home
search completion range setting (P017). (The inverter continues to output the POK signal until the ORT
terminal is turned off.) After home search operation has been completed, servo lock status continues
until the operation command is turned off.
P011: Encoder pulse-per-revolution (PPR)
setting
P014: Home search stop position setting
P015: Home search speed setting
P016: Home search direction setting
P017: Home search completion range setting
P018: Home search completion delay time
setting
P023: Position loop gain setting
C001 to C008: Terminal [1] to [8] functions
C021 to C025: Terminal [11] to [15] functions
C026: Alarm relay terminal function
Related code
O
p
eration command
(
FW or
ORT terminal
Z
p
ulse
Output Frequency
Home search s
p
eed settin
g
(
P015
)
ON
ON
ON
POK si
g
nal
Home search completion
range setting
(P017)
Home search completion delay
time setting (P018)
S
p
eed control Position control
(
1
)
(
2
)
(
3
)
(
4
)