



















Chapter 4 Explanation of Functions
4 - 108
4.3.14 Multistage position switching function (CP1/CP2/CP3)
- When functions "66" (CP1) to "68" (CP3) are assigned to terminal [1] function (C001) to terminal [8]
function (C008), you can select a position setting from multistage positions 0 to 7.
- Use multistage position settings 0 to 7 (P060 to P067) for the position settings.
- If no position settings are assigned to terminals, multistage position setting 0 (P060) is assumed.
Position setting CP3 CP2 CP1
Multistage position setting 0 0 0 0
Multistage position setting 1 0 0 1
Multistage position setting 2 0 1 0
Multistage position setting 3 0 1 1
Multistage position setting 4 1 0 0
Multistage position setting 5 1 0 1
Multistage position setting 6 1 1 0
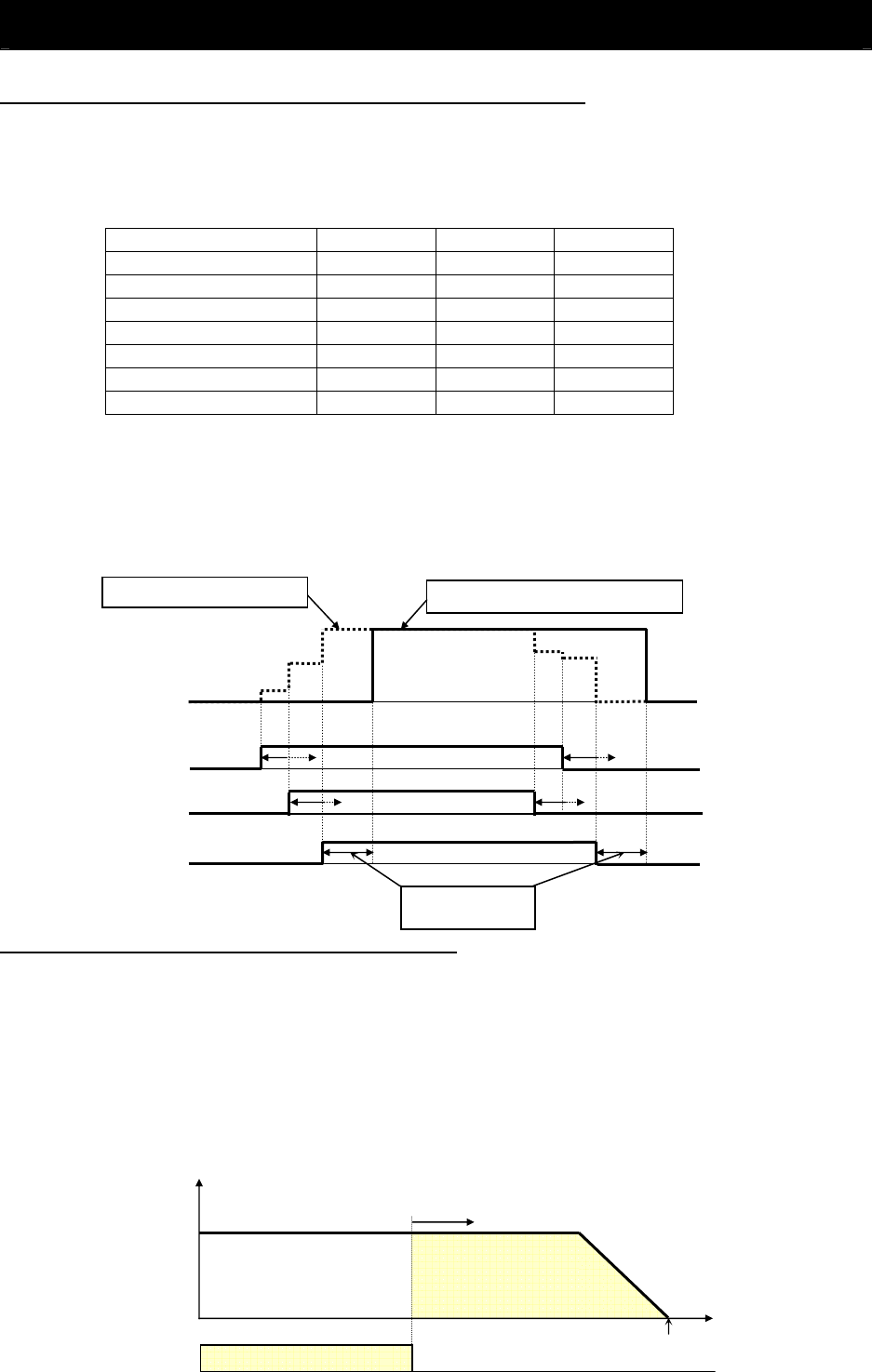
- You can specify a delay to be applied at multistage position setting input, until the relevant terminal input
is determined. Use this specification to prevent the application of fluctuating terminal input before it is
determined.
- You can adjust the determination time with the multistage speed/position determination time setting
(C169). The input data is finally determined when the terminal input becomes stable after the delay set as
C169. (Note that a long determination time deteriorates the input terminal response.)
4.3.15 Speed/position switching function (SPD)
- To perform speed control operation in absolute position control mode, turn on the SPD terminal.
- While the SPD terminal is off, the current position count remains at 0. Therefore, if the SPD terminal is
turned off during operation, the control operation is switched to position control operation based on the
position where the terminal is turned off. (Speed control operation is switched to position control
operation.)
- If the position setting is 0 at this time, the inverter stops the motor at that position.
(Hunting may occur if a certain position loop gain value has been set.)
- While the SPD terminal is on, the rotating direction depends on the operation command. When switching
from speed control to position control, pay attention to the sign of the value set in the operation command.
Determination time
(C169)
CP1
CP2
CP3
Position command
Determination time (C169) specified
4
1
5
3
Determination time (C169) = 0
7
Position control Speed control
ON
Output frequency
SPD terminal
Time
Target position
Start of position counting