










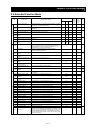
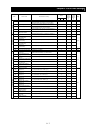



Chapter 8 List of Data Settings
8 - 4
Default
Code Function name Monitored data or setting
_FF _FEF _FUF
Setting
during
operation
(allowed or
not)
Change
during
operation
(allowed or
not)
Page
A041 Torque boost method selection 00 (manual torque boost), 01 (automatic torque boost) 00
¯ ¯
A241
Torque boost method selection,
2nd motor
00 (manual torque boost), 01 (automatic torque boost) 00
¯ ¯
A042 Manual torque boost value 0.0 to 20.0 (%) 1.0
{ {
A242
Manual torque boost value, 2nd
motor
0.0 to 20.0 (%) 1.0
{ {
A342
Manual torque boost value, 3rd
motor
0.0 to 20.0 (%) 1.0
{ {
A043
Manual torque boost frequency
adjustment
0.0 to 50.0 (%) 5.0
{ {
A243
Manual torque boost frequency
adjustment, 2nd motor
0.0 to 50.0 (%) 5.0
{ {
A343
Manual torque boost frequency
adjustment, 3rd motor
0.0 to 50.0 (%) 5.0
{ {
4-18
A044
V/F characteristic curve
selection, 1st motor
00 (VC), 01 (VP), 02 (free V/f), 03 (sensorless vector control), 04 (0Hz-range
sensorless vector), 05 (vector with sensor)
00
¯ ¯
A244
V/F characteristic curve
selection, 2nd motor
00 (VC), 01 (VP), 02 (free V/f), 03 (sensorless vector control), 04 (0Hz-range
sensorless vector)
00
¯ ¯
A344
V/F characteristic curve
selection, 3rd motor
00(VC), 01(VP) 00
¯ ¯
4-16
A045 V/f gain setting 20. to 100. (%) 100.
{ {
4-15
A046
Voltage compensation gain
setting for automatic torque
boost. 1st motor
0. to 255. 100.
{ {
A246
Voltage compensation gain
setting for automatic torque
boost, 2nd motor
0. to 255. 100.
{ {
A047
Slippage compensation gain
setting for automatic torque
boost, 1st motor
0. to 255. 100.
{ {
V/f characteristic
A247
Slippage compensation gain
setting for automatic torque
boost, 2nd motor
0. to 255. 100.
{ {
4-18
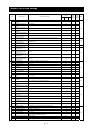
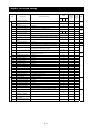
A051 DC braking enable 00 (disabling), 01 (enabling), 02 (set frequency only) 00
¯ {
A052 DC braking frequency setting 0.00 to 99.99, 100.0 to 400.0 (Hz) 0.50
¯ {
A053 DC braking wait time 0.0 to 5.0 (s) 0.0
¯ {
A054
DC braking force during
deceleration
0. to 100. (%) 0.
¯ {
A055 DC braking time for deceleration 0.0 to 60.0 (s) 0.0
¯ {
A056
DC braking/edge or level
detection for [DB] input
00 (edge operation), 01 (level operation) 01
¯ {
A057 DC braking force for starting 0. to 100.(%) 0.
¯ {
A058 DC braking time for starting 0.0 to 60.0(s) 0.0
¯ {
DC braking
A059
DC braking carrier frequency
setting
0.5 to 15.0(kHz) 5.0
¯ ¯
4-20
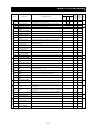
A061 Frequency upper limit setting 0.00 or "1st minimum frequency limit" to "maximum frequency" (Hz) 0.00
¯ {
A261
Frequency upper limit setting,
2nd motor
0.00 or "2nd minimum frequency limit" to "maximum frequency, 2nd motor" (Hz) 0.00
¯ {
A062 Frequency lower limit setting
0.00 or "start frequency" to "maximum frequency limit"
(Hz)
0.00
¯ {
A262
Frequency lower limit setting,
2nd motor
0.00 or "start frequency" to "maximum frequency, 2nd motor limit"
(Hz)
0.00
¯ {
4-24
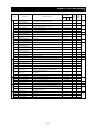
A063
Jump (center) frequency setting
1
0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A064
Jump (hysteresis) frequency
width setting 1
0.00 to 10.00 (Hz) 0.50
¯ {
A065
Jump (center) frequency setting
2
0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A066
Jump (hysteresis) frequency
width setting 2
0.00 to 10.00 (Hz) 0.50
¯ {
A067
Jump (center) frequency setting
3
0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
A068
Jump (hysteresis) frequency
width setting 3
0.00 to 10.00 (Hz) 0.50
¯ {
A069
Acceleration stop frequency
setting
0.00 to 99.99, 100.0 to 400.0 (Hz) 0.00
¯ {
Frequency upper/lower limit and jump frequency
A070
Acceleration stop time frequency
setting
0.0 to 60.0 (s) 0.0
¯ {
4-25
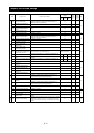
A071 PID Function Enable 00 (disabling), 01 (enabling), 02 (enabling inverted-data output) 00
¯ {
A072 PID proportional gain 0.2 to 5.0 1.0
{ {
A073 PID integral time constant 0.0 to 999.9, 1000. to 3600. (s) 1.0
{ {
A074 PID derivative gain 0.00 to 99.99, 100.0 (s) 0.00
{ {
A075 PV scale conversion 0.01 to 99.99 1.00
¯ {
A076 PV source setting
00 (input via OI), 01 (input via O), 02 (external communication), 03 (pulse-string
frequency input), 10 (operation result output)
00
¯ {
A077 Output of inverted PID deviation 00(OFF), 01 (ON) 00
¯ {
A078 PID variation range 0.0 to 100.0 (%) 0.00
¯ {
PID control
A079 PID feed forward selection 00 (disabled), 01 (O input), 02 (OI input), 03 (O2 input) 00
¯ {
4-26