
















5-40
Constant Control mode settingChang
es dur-
ing op-
eration
Default
setting
Setting
range
Setting
unit
Regis-
ter No.
NameConstant
Flux
vector
Open
loop
vector
V/f with
PG
V/f
control
Chang
es dur-
ing op-
eration
Default
setting
Setting
range
Setting
unit
Regis-
ter No.
Name
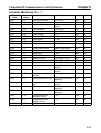
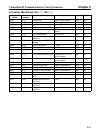
b2-04 DC injection braking
time at stop.
018A 0.01 0.00 to 10.00 0.50 No Yes Yes Yes Yes
b3-01 Speed search
selection at start
018E 1 0, 1 0 (See
note.)
No Yes Yes Yes Yes
b3-02 Speed search
operation current
018F 1 0 to 200 100
(See
note.)
No Yes No Yes No
b3-03 Speed search
deceleration time
0190 0.1 0.1 to 10.0 2.0 No Yes No Yes No
b4-01 Timer function
ON-delay time
0192 0.1 0.0 to 300.0 0.0 No Yes Yes Yes Yes
b4-02 Timer function
OFF-delay time
0193 0.1 0.0 to 300.0 0.0 No Yes Yes Yes Yes
b5-01 PID control selection 0194 1 0 to 2 0 No Yes Yes Yes Yes
b5-02 Proportional gain (P) 0195 0.01 0.00 to 25.00 1.00 Yes Yes Yes Yes Yes
b5-03 Integral time (I) 0196 0.1 0.0 to 360.0 1.0 Yes Yes Yes Yes Yes
b5-04 Integral limit (I) 0197 0.1 0.0 to 100.0 100.0 Yes Yes Yes Yes Yes
b5-05 Differential time (D) 0198 0.01 0.00 to 10.00 0.00 Yes Yes Yes Yes Yes
b5-06 PID limit 0199 0.1 0.0 to 100.0 100.0 Yes Yes Yes Yes Yes
b5-07 PID offset adjustment 019A 0.1 –100.0 to
100.0
0.0 Yes Yes Yes Yes Yes
b5-08 PID primary delay
time constant
019B 0.01 0.00 to 10.00 0.00 Yes Yes Yes Yes Yes
b6-01 Dwell frequency at
start
019C 0.1 0.0 to 400.0 0.0 No Yes Yes Yes Yes
b6-02 Dwell time at start 019D 0.1 0.0 to 10.0 0.0 No Yes Yes Yes Yes
b6-03 Dwell frequency at
stop
019E 0.1 0.0 to 400.0 0.0 No Yes Yes Yes Yes
b6-04 Dwell time at stop 019F 0.1 0.0 to 10.0 0.0 No Yes Yes Yes Yes
b7-01 Droop control gain 01A0 0.1 0.0 to 100.0 0.0 Yes No No No Yes
b7-02 Droop control delay
time
01A1 0.01 0.03 to 2.00 0.05 Yes No No No Yes
b8-01 Energy-saving gain 01A2 1 0 to 100 80 No Yes Yes No No
b8-02 Energy-saving
frequency
01A3 0.1 0.0 to 400.0 0.0 No Yes Yes No No
b9-01 Zero-servo gain 01A4 1 0 to 100 5 No No No No Yes
b9-02 Zero-servo
completion width
01A5 1 0 to 16,383 10 No No No No Yes
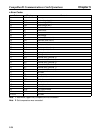
Note When the control mode is changed, the Inverter will revert to default settings. (The open loop vec-
tor control default setting will be displayed.)
CompoBus/D Communications Card Operations Chapter 5