



















Chapter 10 Adjustment
10–22
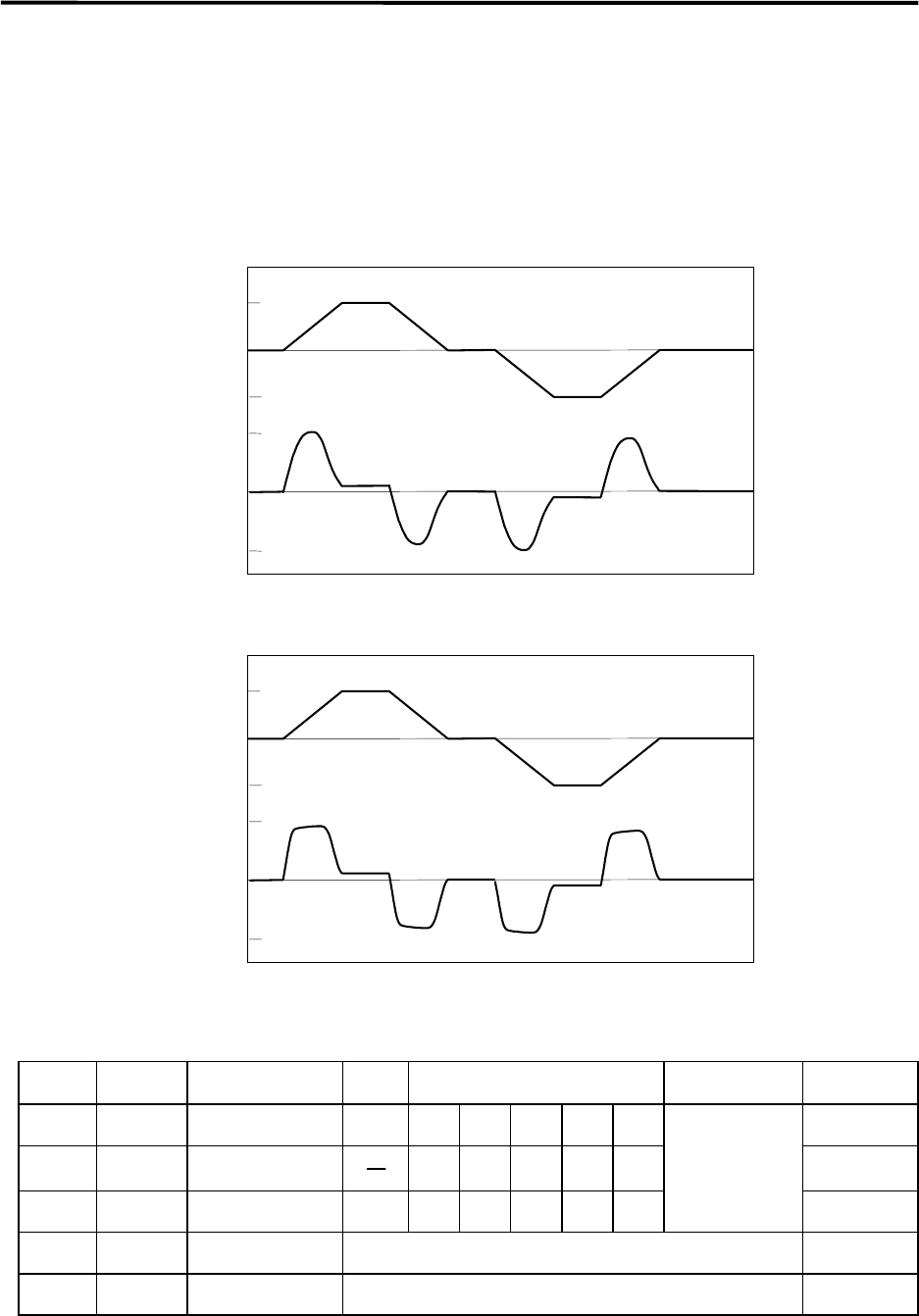
10-3-6 Improvement of characteristics during acceleration/deceleration
(1) SHG control (option function)
Because SHG control has a smoother response than conventional position controls, the
acceleration/deceleration thrust (current FB) has more ideal output characteristics (A constant
thrust is output during acceleration/deceleration.) The peak thrust is kept low by the same
acceleration/deceleration time constant, enabling the time constant to be shortened.
Refer to item "(3) SHG control" in section "10-2-3 Position loop gain" for details on setting SHG
control.
No. Abbrev. Parameter name
Setting
ratio
Setting example Explanation Setting range
SV003
(SV049)
PGN1
(PGN1sp)
Position loop gain 1 1 23 26 33 38 47
1 to 200
(rad/s)
SV004
(SV050)
PGN2
(PGN2sp)
Position loop gain 2
8
3
62 70 86 102 125 0 to 999
SV057
(SV058)
SHGC
(SHGCsp)
SHG control gain 6 140 160 187 225 281
Always set a
combination of 3
parameters.
0 to 1200
SV008 VIA
Speed loop leading
compensation
Set 1900 as a standard value during SHG control. 1 to 9999
SV015 FFC
Acceleration feed
forward gain
Set 100 as a standard value during SHG control. 0 to 999
0
0
120
200
–200
–120
0
0
120
200
–200
–120
Acceleration/deceleration characteristics during conventional control
Speed command
(mm/min.)
Current FB
(stall current %)
Time
Time
Acceleration/deceleration characteristics during SHG control
Speed command
(mm/min.)
Current FB
(stall current %)
Time
Time