


















Chapter 4 Linear Servomotor Specifications
4–5
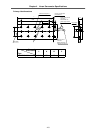
4-4 Dynamic brake characteristics
When the system detects an abnormality, the motor stops the machine using the dynamic brakes. The
machine's coasting amount at this time can be calculated with the following expression.
Lmax = × [ 0.03 + M × { A + B × F0
2
} × 1.1 ] (4-1)
Lmax : Machine coasting amount (m)
F0 : Speed during brake operation (m/min)
M : Total weight of moving section (kg)
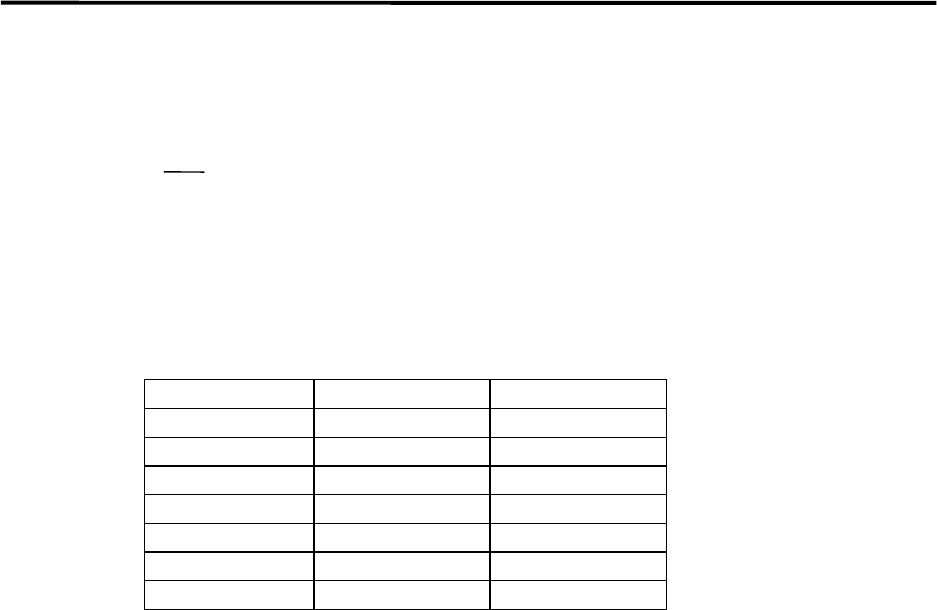
A : Coefficient (according to following table)
B : Coefficient (according to following table)
(Note) Lmax has a ±10% variation due to the motor's inductive voltage constant.
Motor type Coefficient A Coefficient B
LM-NP2S-05M 2.13 × 10
–3
4.5 × 10
–8
LM-NP2M-10M 1.04 × 10
–3
2.26 × 10
–8
LM-NP2L-15M 8.22 × 10
–4
1.3 × 10
–8
LM-NP4S-10M 9.03 × 10
–4
2.61 × 10
–8
LM-NP4M-20M 4.59 × 10
–4
1.11 × 10
–8
LM-NP4L-30M 3.73 × 10
–4
6.18 × 10
–9
LM-NP4G-40M 2.26 × 10
–4
5.74 × 10
–9
F0
60