















Chapter 10 Adjustment
10–44
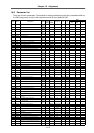
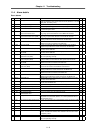
Name Abbrev. Details
Setting range
(unit)
SV040 LMCT
•
Set the lost motion compensation non-sensitive band. The low-order 8 digits are used.
Set this when the lost motion compensation timing does not match during feed forward
control.
•
Current bias: The high-order 8 digits are used. (Icy)
This is used in combination with the SV030 and SV045 high-order 8 digits.
•
Lost motion
compensation
non-sensitive
band
0 to 100 (µm)
∗ Setting range:
–32768 to 32767
SV041 LMC2 Normally set this to 0.
Set this with SV016: LMC1 when setting the lost motion compensation's gain (type 1) or
compensation amount (type 2) to different values according to the command direction.
Set the value for changing the command speed from the – to + direction (during command
direction CW) in SV016:LMC1.
Set the value for changing the command speed from the + to – direction (during command
direction CW) in SV041:LMC2.
When –1 is set, compensation will not be carried out when the command speed direction
changes.
This is valid only when lost motion compensation (SV027: lmc1, lmc2) is selected.
–1 to 200
(%)
(Stall rated
current %)
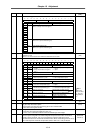
SV042 OVS2 Overshoot compensation 2
Set the overshoot compensation amount for unidirectional movement (command direction
CW).
When 0 is set, the value set for SV031: OVS1 will be set.
When –1 is set, compensation will not be carried out during unidirectional movement.
This is valid only when lost motion compensation (SV027: lmc1, lmc2) is selected.
–1 to 200
(Stall rated
current %)
SV043 OBS1 Observer 1
Set the observer pole.
Normally, set this to approx. 628 (rad).
SV037: JL and SV044: OBS2 must also be set to use the observer function.
Set 0 when not using this function.
0 to 1000
(rad)
SV044 OBS2 Observer 2
Set the execution gain of the observer.
Normally set 100.
SV037: JL and SV043: OBS1 must also be set to use the observer function.
Set 0 when not using this function.
0 to 500
(%)
SV045 TRUB
•
Set the frictional force as a percentage in respect to the stall rated current when using the
collision detection function.
The low-order 8 bits are used.
Set 0 when not using the collision detection function.
•
Current bias: The high-order 8 bits are used. (Ib1)
This is used in combination with the SV030 and SV045 high-order 8 digits.
•
Collision
detection,
friction
0 to 100
(Stall rated
current %)
∗ Setting range:
–32768 to 32767
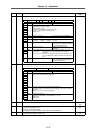
SV046 FHz2 Set the center frequency of the 2nd machine resonance suppression filter.
Set a value that is 36Hz or more. Set 0 when not using this function.
When setting a low frequency that is 100Hz, also set SV033:SSF2/nfd2.
0 to 2250
(Hz)
SV047 EC1 Induction voltage compensation
Set the execution gain for the induction voltage compensation.
Normally, 100 is set.
–32768 to 32767
(%)
SV048 EMGrt Set the brake operation delay time when using the drop prevention function.
Set a value larger than the actual brake operation function.
Set 0 when not using the drop prevention function.
SV055: EMGx, SV056: EMGt must also be set when using this function.
0 to 9000
(ms)
SV049 PGN1sp Set the position loop gain for special operations (synchronous tap, interpolation with spindle C
axis, etc.).
Norm ally, set the spindle position loop gain.
1 to 200
(rad/s)
SV050 PGN2sp Set this with SV058:SHGCsp when carrying out SHG control during special operations
(synchronous tap, interpolation with spindle C axis, etc.).
0 to 999
(rad/s)
SV051 DFBT This is not used with the linear system.
Set to 0.
0 to 9999
(ms)
SV052 DFBN This is not used with the linear system.
Set to 0.
0 to 9999
(µm)
SV053 OD3 Set the excessive error detection width at servo ON for special operations (absolute position
default setting, stopper operation, etc.).
When 0 is set, the excessive error will not be detected during special operations and servo ON.
0 to 32767
(mm)
SV054 ORE Set the overrun detection width for the closed loop.
When –1 is set, the overrun will not be detected.
When 0 is set, the overrun will be detected with a 2(mm) width.
–1 to 32767
(mm)
SV055 EMGx Set the max. delay time for emergency stop when using the drop prevention function.
Normally, the same value as SV056: EMGt is set.
Set 0 when not using the drop prevention function.
0 to 2000
(ms)