



















Chapter 10 Adjustment
10–23
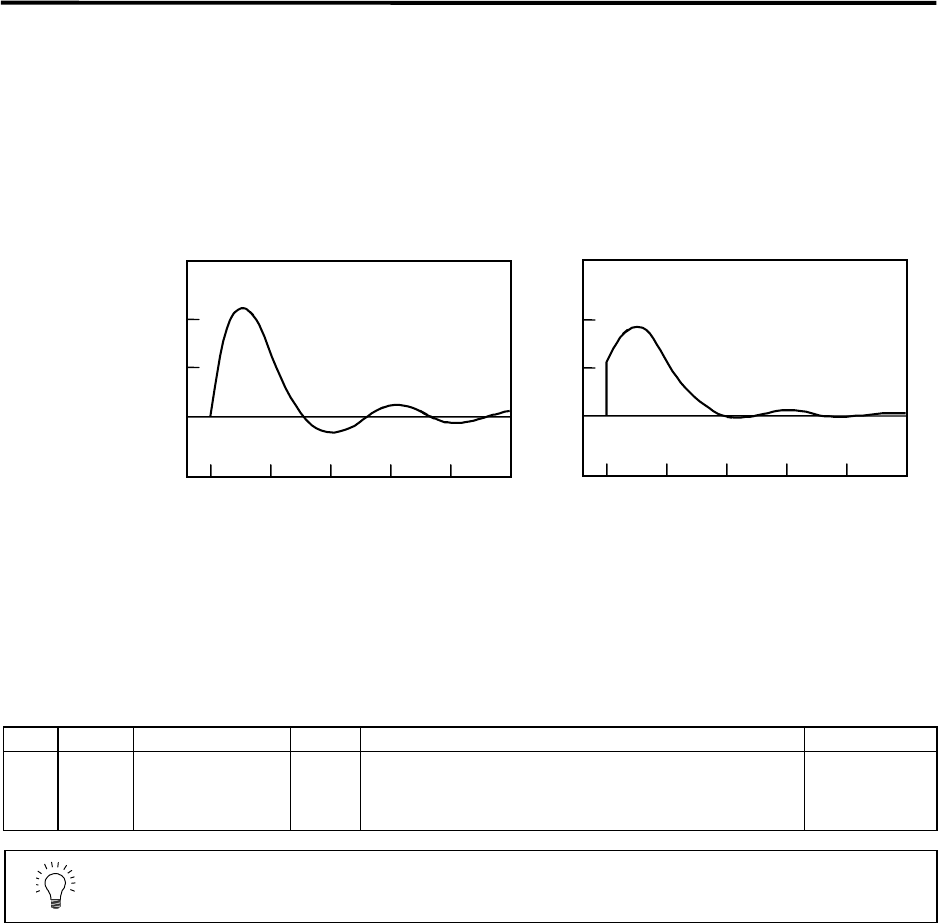
(2) Acceleration feed forward
Vibration may occur at 10 to 20 Hz during acceleration/deceleration when a short time constant of
30 msec or less is applied, and a position loop gain (PGN1) higher than the general standard
value or SHG control is used. This is because the thrust is insufficient when starting or when
starting deceleration, and can be resolved by setting the acceleration feed forward gain
(SV015:FFC). This is also effective in reducing the peak current (torque).
While measuring the current command waveform, increase FFC by 50 to 100 at a time and set
the value where vibration does not occur.
No FFC setting With FFC setting
Acceleration feed forward gain means that the speed loop gain during acceleration/deceleration is
raised equivalently. Thus, the thrust (current command) required during acceleration/deceleration
starts sooner. The synchronization precision will improve if the FFC of the delayed side axis is
raised between axes for which high-precision synchronous control (such as synchronous tap
control and superimposition control).
No. Abbrev. Parameter name Unit Explanation Setting range
SV015 FFC Acceleration feed
forward gain
% The standard setting value is 0. To improve the
acceleration/deceleration characteristics, increase the value
by 50 to 100 at a time. During SHG control, the standard
setting value is 100.
1 to 999
POINT
Overshooting occurs easily when a value above the standard value is set
during SHG control.
Current
command
(%)
200
100
0
100
80 60 40
20 0
Time ms
200
100
0
100
80 60 40
20 0
Time ms