

















Chapter 10 Adjustment
10–37
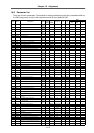
10-6 Parameter list
There are 64 servo parameters. The methods for setting and displaying the servo parameters differ on
the CNC being used, so refer to the instruction manual for the respective CNC.
Class
Name Abbrev. Descriptions
Setting
screen
B-Vx
compa-t
ibility
Chang-i
ng
method
Setting unit
Min.
unit
Max.
unit
Machine
specifica-t
ions
Servo
specifica-t
ions
Adjust-me
nt
SV001 PC1 Motor side gear ratio
Specifi-c
ations
Default 1 32767
SV002 PC2 Machine side gear ratio
Specifi-c
ations
Default 1 32767
SV003 PGN1 Position loop gain 1
Specifi-c
ations
Normal rad/s 1 200
SV004 PGN2 Position loop gain 2
Adjust-m
ent
Normal rad/s 0 999
SV005 VGN1 Speed loop gain 1
Adjust-m
ent
Normal 1 999
SV006 VGN2 Speed loop gain 2 Normal –1000 1000
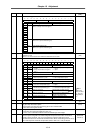
SV007 VIL Speed loop delay compensation
Adjust-m
ent
Normal 0 32767
SV008 VIA Speed loop leading compensation
Adjust-m
ent
Normal 1 9999
SV009 IQA Current loop q axis compensation Normal 1 20480
SV010 IDA Current loop d axis compensation Normal 1 20480
SV011 IQG Current loop q axis gain Normal 1 4096
SV012 IDG Current loop d axis gain Normal 1 4096
SV013 ILMT Current limit value Normal Stall current % 0 999
SV014 ILMTsp Current limit value during special operation Normal Stall current % 0 999
SV015 FFC Acceleration feed forward gain
Adjust-m
ent
Normal % 0 999
SV016 LMC1 Lost motion compensation 1
Adjust-m
ent
Normal Stall current % –1 200
SV017 SPEC Servo specifications
Specifi-c
ations
∆ Default HEX setting ∗ ∗
SV018 PIT Linear motor pole pitch
Specifi-c
ations
Default mm 1 32767
SV019 RNG1 Position detector resolution
Specifi-c
ations
Default kp/PIT 1 9999
SV020 RNG2 Speed detector resolution
Specifi-c
ations
Default kp/PIT 1 9999
SV021 OLT Overload time constant Normal s 1 300
SV022 OLL Overload detection level Normal Stall current % 1 500
SV023 OD1 Excessive error detection width during servo ON Normal mm 0 32767
SV024 INP In-position detection width Normal µm 0 32767
SV025 MTYP Motor/detector type
Specifi-c
ations
∆ Default HEX setting ∗ ∗
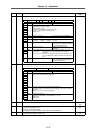
SV026 OD2
Excessive error detection width during servo
OFF
Normal mm 0 32767
SV027 SSF1 Special servo function selection 1
Specifi-c
ations
∆ Normal HEX setting ∗ ∗
SV028 MSFT Linear motor pole shift amount Default µm –30000 30000
SV029 VCS Speed loop gain, change start speed Normal mm/s 0 9999
SV030 IVC Current/voltage compensation Normal –32768 32767
SV031 OVS1 Overshooting compensation
Adjust-m
ent
Normal % –1 100
SV032 TOF Thrust offset
Adjust-m
ent
Normal Stall current % –100 100
SV033 SSF2 Special servo function selection 2
Specifi-c
ations
∆ Normal HEX setting ∗ ∗
SV034 SSF3 Special servo function selection 3 Normal HEX setting ∗ ∗
SV035 SSF4 Special servo function selection 4 Normal HEX setting ∗ ∗
SV036 PTYP Power supply type
Specifi-c
ations
Default HEX setting ∗ ∗
SV037 JL Total movable mass during linear motor
Adjust-m
ent
Normal kg 0 5000
SV038 FHz1
Machine resonance suppression filter center
frequency 1
Adjust-m
ent
∆ Normal Hz 0 9000
SV039 LMCD Lost motion compensation timing Normal ms 0 2000
SV040 LMCT
Current compensation/lost motion compensation
non-sensitive band
Adjust-m
ent
Normal –/µm –32768 32767
SV041 LMC2 Lost motion compensation 2
Adjust-m
ent
Normal Stall current % –1 200
SV042 OVS2 Overshooting compensation 2 Normal Stall current % –1 100
SV043 OBS1 Observer 1 Normal rad 0 1000
SV044 OBS2 Observer 2 Normal % 0 500
SV045 TRUB Current compensation/frictional force Normal
–/Stall
current %
–32768 32767
SV046 FHz2
Machine resonance suppression filter center
frequency 2
Adjust-m
ent
Normal Hz 0 9000
SV047 EC1 Inductive voltage compensation Normal % ∗ ∗
SV048 EMGrt Brake operation delay time Normal ms 0 2000
SV049 PGN1sp Position loop gain 1 during special operation Normal rad/s 1 200
SV050 PGN2sp Position loop gain 2 during special operation Normal rad/s 0 999
SV051 DFBT Normal ms 0 9999
SV052 DFBN Normal µm 0 9999
SV053 OD3
Excessive error detection width during special
operation
Normal mm 0 32767
SV054 ORE CN3 connection system, overrun detection width Normal mm –1 32767