



















Chapter 3 Selection
3–5
(2) Unbalance axis load force
When operations (1) to (8) are for an unbalance axis, calculate so that the following forces are
required in each period. Note that the forward speed shall be an upward movement.
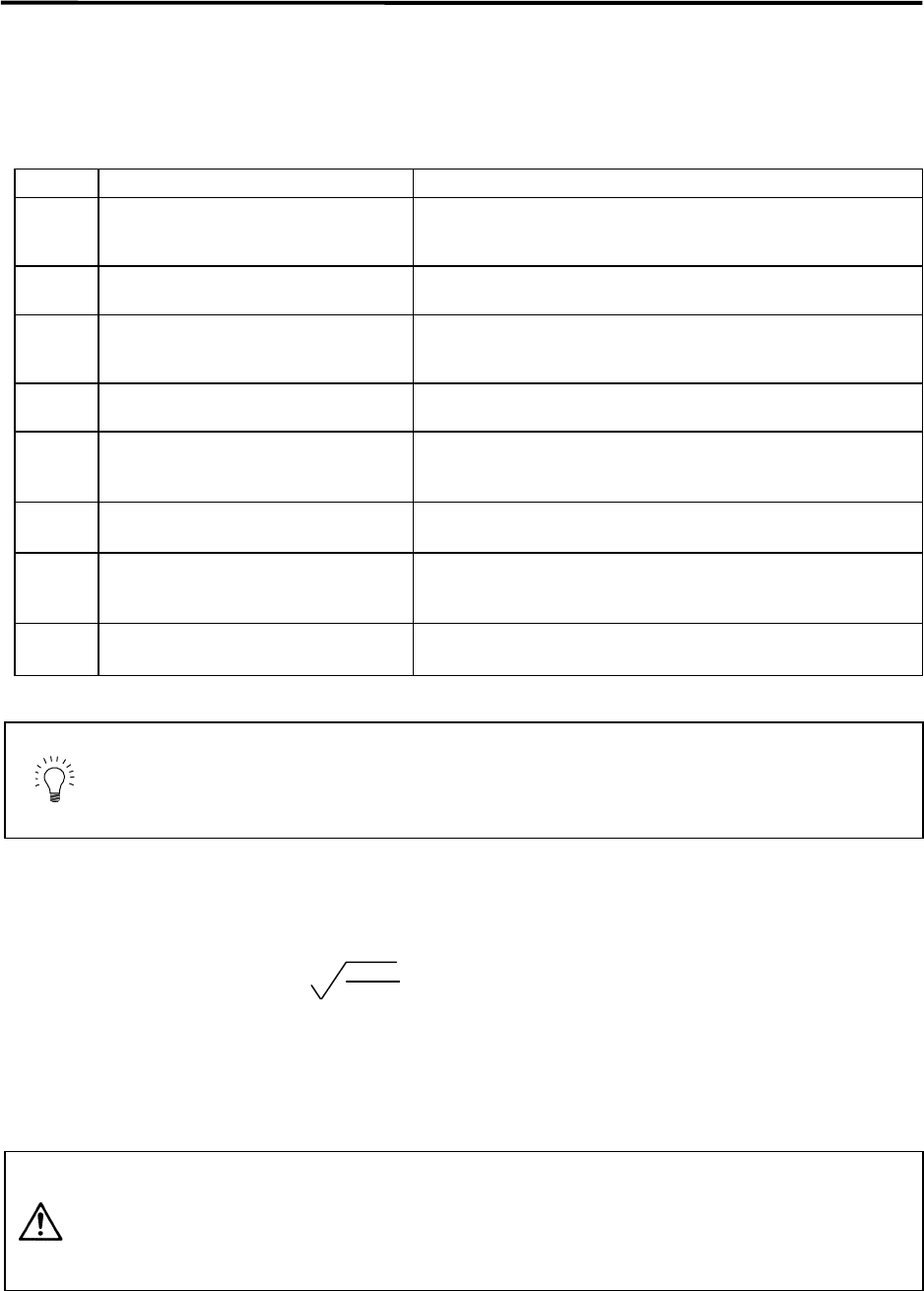
Table 3-2 Load thrusts of unbalance axes
Period Load thrust calculation method Explanation
(1)
(Amount of acceleration thrust) +
(Kinetic friction force) + (Unbalance
force)
Normally the acceleration/deceleration time constant is
calculated so this thrust is 80% of the maximum thrust of the
motor.
(2)
(Kinetic friction force) + (Unbalance
force) + (Cutting force)
(3)
(Amount of deceleration thrust) +
(Kinetic friction force) + (Unbalance
thrust)
The signs for the amount of acceleration thrust and amount of
deceleration thrust are reversed when the absolute value is
the same value.
(4)
(Static friction force) + (Unbalance
force)
The holding force during a stop becomes fairly large.
(Upward stop)
(5)
− (Amount of acceleration thrust) −
(Kinetic friction force) + (Unbalance
force)
(6)
− (Kinetic friction force) + (Unbalance
force) − (Cutting force)
The generated force may be in the reverse of the movement
direction, depending on the size of the unbalance force.
(7)
− (Amount of deceleration thrust) −
(Kinetic friction force) + (Unbalance
force)
(8)
− (Static friction force) + (Unbalance
force)
The holding force becomes smaller than the upward stop.
(Downward stop)
POINT
During a stop, the static friction force may constantly be applied. The static
friction force and unbalance force may particularly become larger during an
unbalance upward stop, and the thrust during a stop may become extremely
large. Therefore, caution is advised.
(3) Max. cutting thrust and max. cutting duty
If the max. cutting force and max. cutting duty (%/min) are known, the following expression can be
used for the selection conditions.
0.8 × Fs ≥ Fc ×
D
100
(3-4)
Fs : Motor continuous thrust (N)
Fc : Max. cutting force during operation (N)
D : Max. cutting duty (%/min)
(4) Unbalance force
CAUTION
For an unbalanced axis, such as a gravity axis, basically balance it with a
device such as a counterbalance. With the linear motor, the continuous thrust
is lower than the rotary motor, so if the axis is unbalanced the motor's heating
amount will increase. If an error should occur, the axis will drop naturally. This
is hazardous as the dropping distance and dropping speed are large.