


















November 2003 © TOSHIBA TEC 3 - 79 e-STUDIO3511/4511 ADJUSTMENT
Setting Item
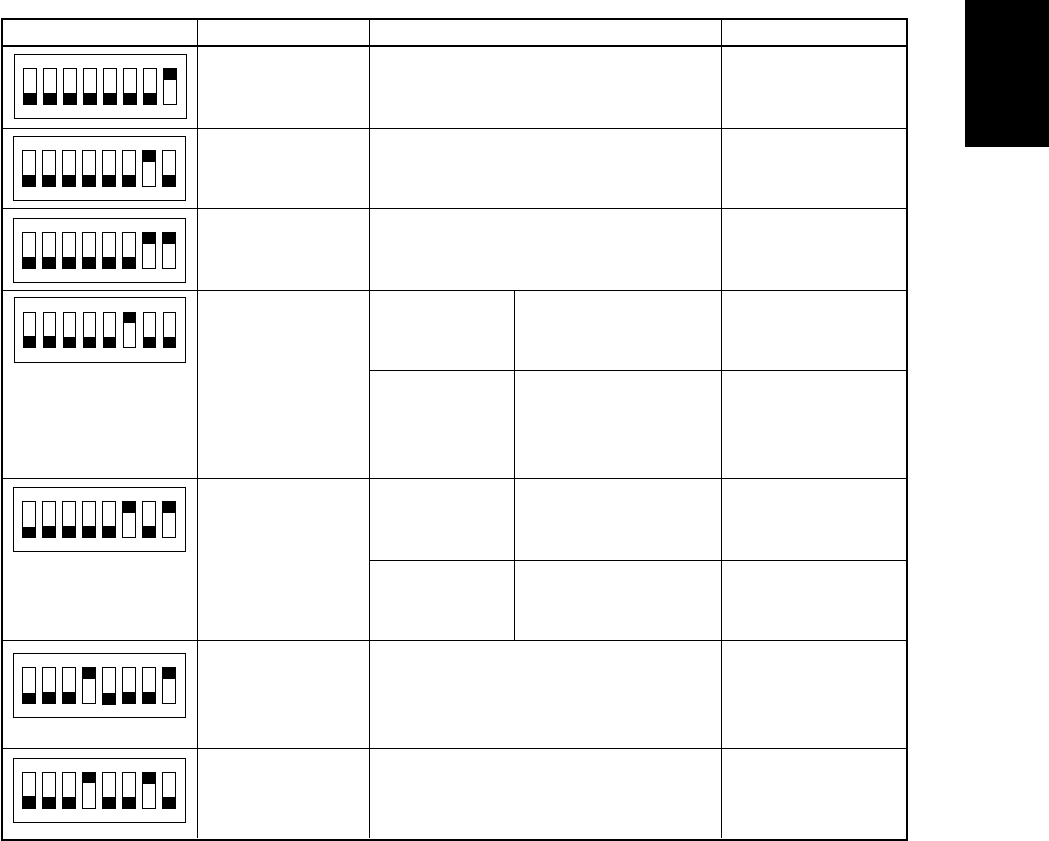
Delivery motor
Stack processing
motor (stack
delivery lever)
Stack processing
motor
(returning roller)
Front jogging plate
motor
Rear jogging plate
motor
Upper stack tray
motor (up)
Upper stack tray
motor (down)
Operation
The delivery roller rotates in a specific
speed.
The stack delivery lever moves to its
home position and stops.
The returning roller moves to the home
position and stops.
When not at the
home position
When at the
home position
When not at the
home position
When at the
home position
The upper stack tray moves up and
stops when the upper stack tray upper
limit sensor turns ON.
The upper stack tray moves down and
stops when the lower stack tray lower
limit sensor turns ON.
To stop
• Press SW2 again.
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Turn OFF the joint
sensor (S4).
• Press SW2 again.
• Turn OFF the joint
sensor (S4).
• Press SW2 again.
• Turn OFF the joint
sensor (S4).
The front jogging plate
moves to its home
position and stops.
The front jogging plate
moves over a specific
position and stops at
the home position.
The rear jogging plate
moves to the home
position and stops.
The rear jogging plate
moves over a specific
distance and stops.
ON
12345678
ON
12345678
ON
12345678
ON
12345678
ON
12345678
ON
12345678
ON
12345678
3.13.7 DIP switch functions
You can simulate various functions by setting the DIP switch (SW1) on the finisher controller PC board
appropriately.
Initiating Operations
1) Remove any obstacles from the area of operation.
2) Set the DIP switch (SW1) as shown, and turn ON the power (so that LED1 will start to blink).
3) Press the pushing switch (SW2) twice to initiate the operation in question. (LED2 will remain on
during operation).