



















107
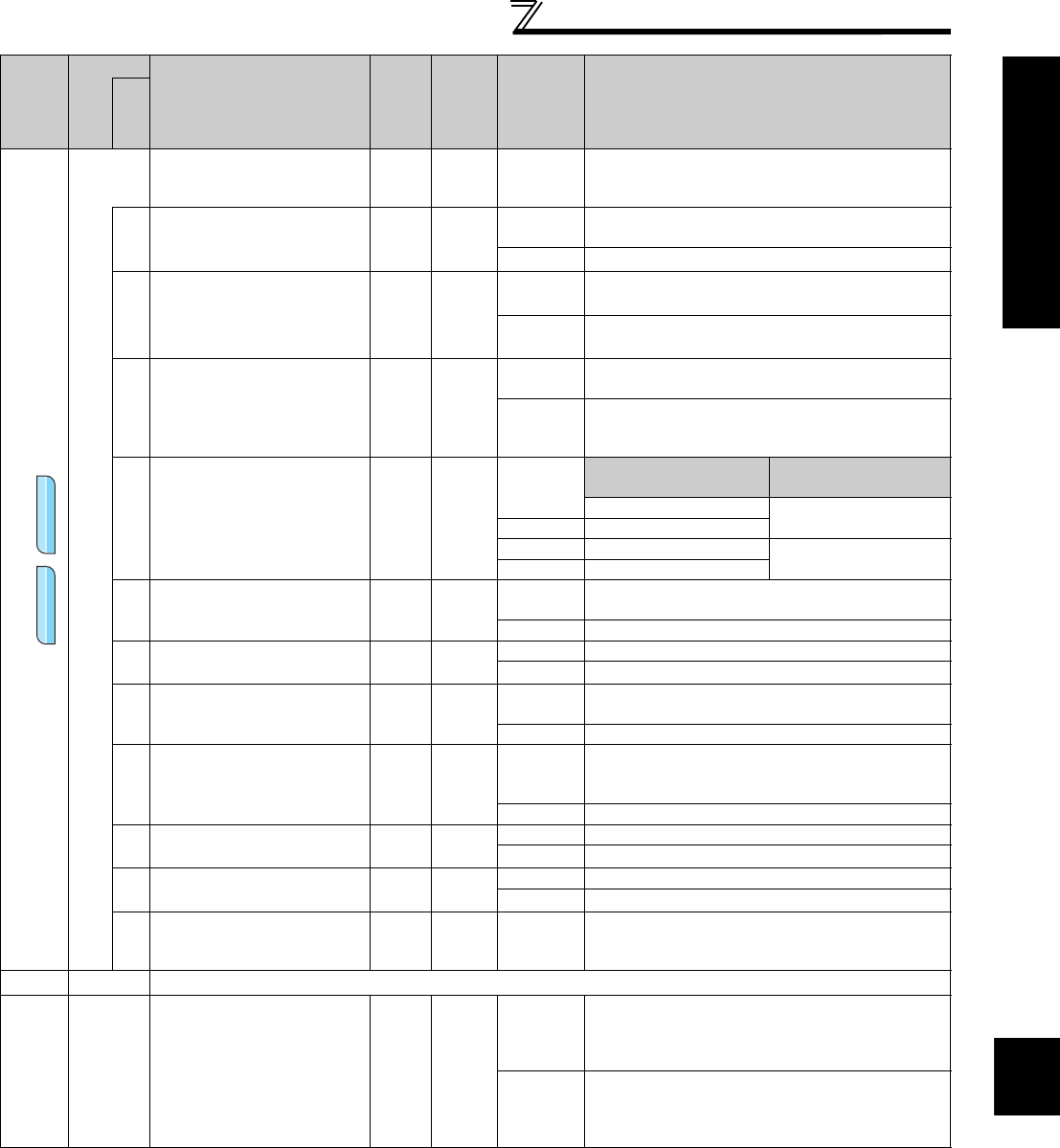
Parameter List
Parameter List
4
DRIVING THE MOTOR
Torque limit level
22
Torque limit level
0.1% 150% 0 to 400%
This functions as torque limit level under Real
sensorless vector control.
Refer to page 106 for stall prevention operation level.
157
OL signal output timer
0.1s 0s
0 to 25s
Set the output start time of the OL signal output when
torque limit is activated.
9999 Without the OL signal output
803
Constant power range
torque characteristic
selection
10
0 Constant output limit (torque current limit and control)
1 Constant-torque limit (torque limit and control)
810
Torque limit input method
selection
10
0
Internal torque limit
Parameter-set torque limit operation is performed.
1
External torque limit
Torque limit based on the analog input from terminal
1 and 4.
811
Set resolution switchover
10
Running speed
increments
Torque limit
increments
0 1r/min
0.1% increments
1 0.1r/min
10 1r/min
0.01% increments
11 0.1r/min
812
Torque limit level
(regeneration)
0.1% 9999
0 to 400%
Set the torque limit level for forward rotation
regeneration.
9999 Pr. 22 value is used for limit.
813
Torque limit level (3rd
quadrant)
0.1% 9999
0 to 400% Set the torque limit level for reverse rotation driving.
9999 Pr. 22 value is used for limit.
814
Torque limit level (4th
quadrant)
0.1% 9999
0 to 400%
Set the torque limit level for reverse rotation
regeneration.
9999 Pr. 22 value is used for limit.
815
Torque limit level 2
0.1% 9999
0 to 400%
When the torque limit selection (TL) signal is on, the
Pr. 815 value is a torque limit value regardless of Pr.
810.
9999 The torque limit set to Pr. 810 is active.
816
Torque limit level during
acceleration
0.1% 9999
0 to 400% Set the torque limit value during acceleration.
9999 Same torque limit as at constant speed
817
Torque limit level during
deceleration
0.1% 9999
0 to 400% Set the torque limit value during deceleration.
9999 Same torque limit as at constant speed
874
OLT level setting
0.1% 150% 0 to 200%
This function can make an inverter trip if the torque
limit is activated to stall the motor. Set the output
torque at which an inverter trip is made in Pr. 874 .
—
24 to 27
Refer to Pr. 4 to Pr. 6.
Input compensation
of multi-speed and
remote setting
28
Multi-speed input
compensation selection
10
0 Without compensation
1 With compensation
Func
t
ion
Parameter
Name
Incre
ments
Initial
Value
Range Description
Related
parameters
Sensorless
Sensorless
Sensorless Vector
Vector
Vector