



















81
Before operation
4
DRIVING THE MOTOR
(6) Troubleshooting (speed)
Phenomenon Cause Countermeasures
1
Motor does not rotate.
(Vector control)
(1) The motor wiring is wrong (1) Wiring check
Select V/F control (set "9999" in Pr. 80 or Pr. 81 ) and
check the rotation direction of the motor.
For the SF-V5RU (1500r/min series), set "160V
(320V)" in Pr. 19 Base frequency voltage, and set "50Hz"
in Pr. 3 Base frequency.
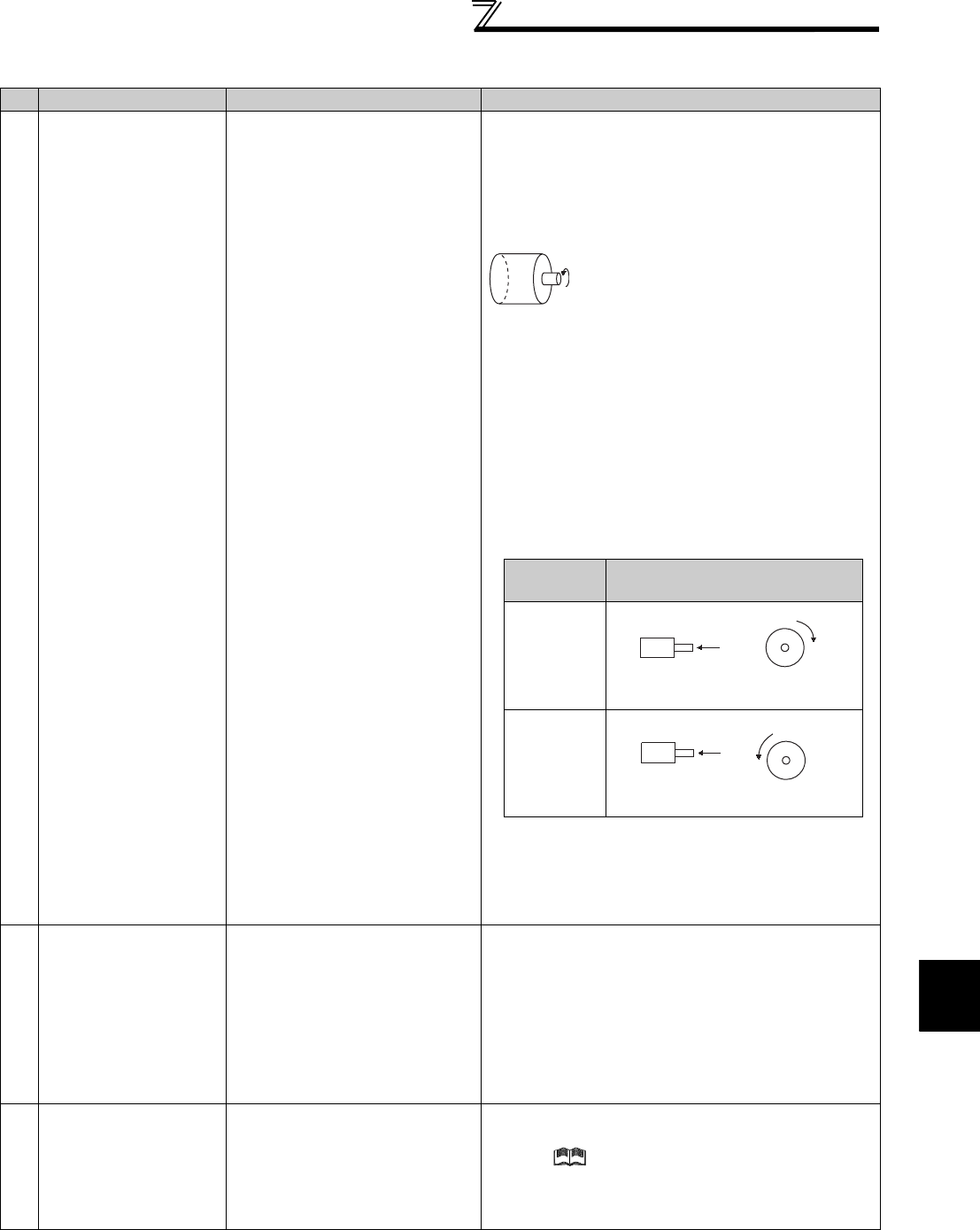
When the forward rotation signal is input,
the motor running in the counterclockwise
direction as viewed from the motor shaft is
normal. (If it runs in the clockwise direction,
the phase sequence of the inverter output
side wiring is incorrect.)
(2) Encoder specifications (encoder
specification selection switch
FR-A7AP/FR-A7AL (option)) are
wrong
(2) Check the encoder specifications.
Check the encoder specifications selection switch
(FR-A7AP/FR-A7AL (option)) of differential/
complementary
(3) The encoder wiring is wrong. (3) Check that FWD is displayed when running the motor
in the counter-clockwise direction from outside during
a stop of the inverter with vector control setting.
If REV is displayed, the encoder phase sequence is
wrong.
Perform the correct wiring or match the Pr. 359 Encoder
rotation direction.
(4) The Pr. 369 Number of encoder
pulses setting and the number of
encoder used are different.
(4) The motor will not run if the parameter setting is
smaller than the number of encoder pulses used. Set
the Pr. 369 Number of encoder pulses correctly.
(5) Encoder power specifications
are wrong. Or, power is not input.
(5) Check the power specifications (5V/12V/15V/24V) of
encoder and input the external power supply.
2
Motor does not run at
correct speed. (Speed
command does not match
actual speed)
(1) The speed command from the
command device is incorrect.
The speed command is
compounded with noise.
(1) Check that a correct speed command comes from the
command device.
Decrease Pr. 72 PWM frequency selection.
(2) The speed command value
does not match the inverter-
recognized value.
(2) Readjust speed command bias/gain Pr. 125, Pr. 126, C2
to C7 and C12 to C15.
(3) The number of encoder pulses
setting is incorrect.
(3) Check the setting of Pr. 369 Number of encoder pulses.
(vector control)
3
Speed does not rise to the
speed command.
(1) Insufficient torque.
Torque limit is actuated.
(1) -1 Increase the torque limit value.
(Refer to torque limit of speed control on Chapter 4
of the Instruction Manual (Applied) )
(1) -2 Insufficient capacity
(2) Only P (proportional) control is
selected.
(2) When the load is heavy, speed deviation will occur
under P (proportional) control. Select PI control.
Pr. 359
Setting
Relationship between the Motor
and Encoder
0
1
(Initial value)
A
Encoder
CW
Clockwise direction as viewed
from A is forward rotation
CCW
A
Encoder
Counter clockwise direction as
viewed from A is forward rotation