168
Check first when you have a trouble
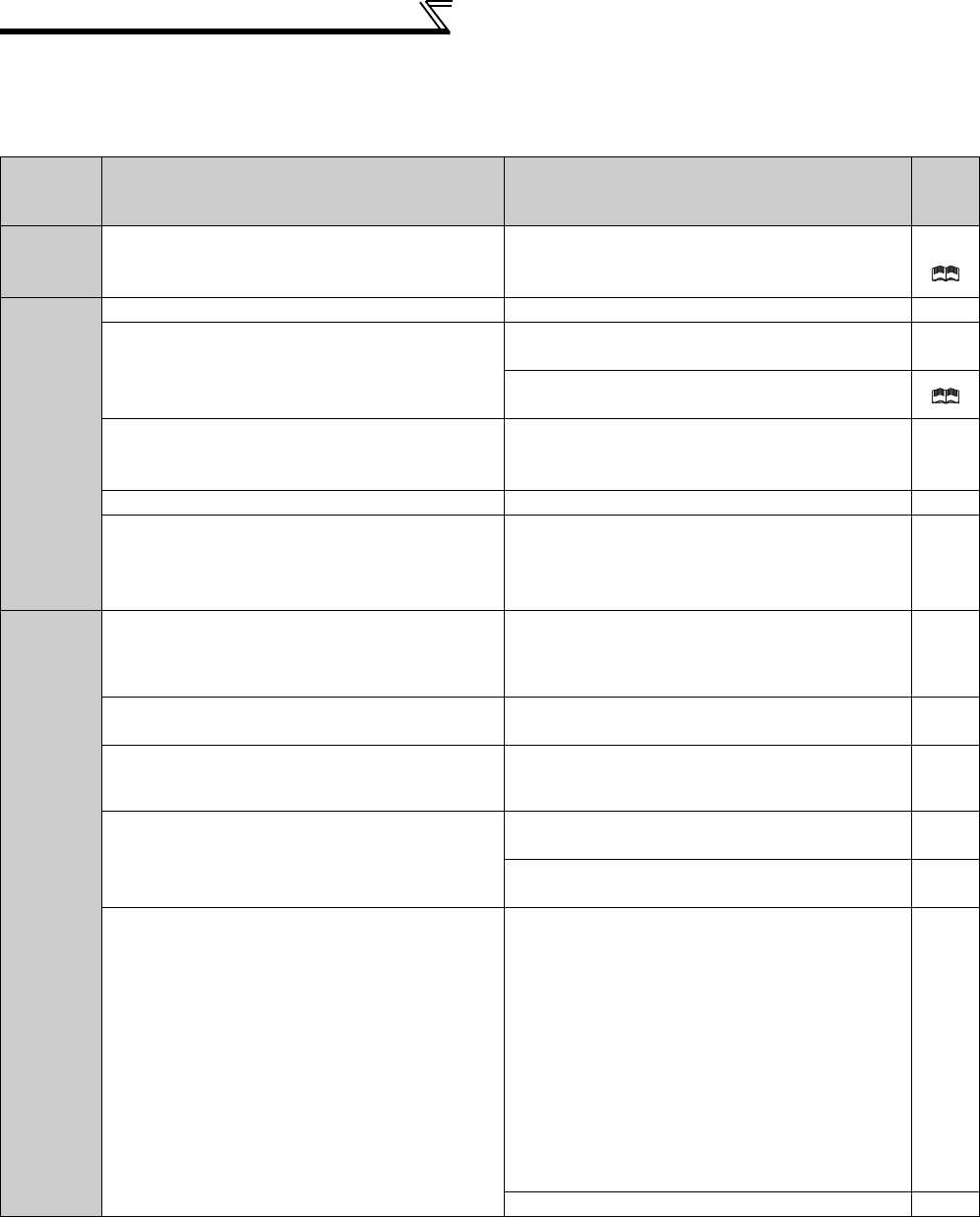
5.6.11 Speed varies during operation
When Advanced magnetic flux vector control, Real sensorless vector control, vector control or encoder feedback
control is exercised, the output frequency varies with load fluctuation between 0 and 2Hz. This is a normal operation
and is not a fault.
Check
points
Possible Cause Countermeasures
Refer
to
page
Load
Load varies during an operation.
Select Advanced magnetic flux vector control, Real
sensorless vector control, vector control, or encoder
feedback control.
63, 66,
Input
signal
Frequency setting signal is varying. Check the frequency setting signal. —
The frequency setting signal is affected by EMI.
Set filter to the analog input terminal using Pr. 74
Input filter time constant, Pr. 822 Speed setting filter 1.
114
Take countermeasures against EMI, such as using
shielded wires for input signal lines.
Malfunction is occurring due to the undesirable
current generated when the transistor output unit is
connected.
Use terminal PC (terminal SD when source logic) as
a common terminal to prevent a malfunction caused
by undesirable current.
24
Multi-speed command signal is chattering. Take countermeasures to suppress chattering. —
Feedback signal from the encoder is affected by
EMI.
Place the encoder cable far from the EMI source
such as main circuit and power supply voltage.
Earth (ground) the shield of the encoder cable to the
enclosure using a metal P-clip or U-clip.
31
Parameter
Setting
Pr.80 Motor capacity and Pr.81 Number of motor poles
are not appropriate for the motor capacity under
Advanced magnetic flux vector control, Real
sensorless vector control, or vector control.
Check the settings of Pr.80 Motor capacity and Pr.81
Number of motor poles.
63, 66
Fluctuation of power supply voltage is too large.
Change the Pr. 19 Base frequency voltage setting
(about 3%) under V/F control.
103
Wiring length exceeds 30m when Advanced
magnetic flux vector control, Real sensorless vector
control, or vector control is selected.
Perform offline auto tuning. 71
Wiring length is too long for V/F control, and the a
voltage drop occurs.
Adjust the Pr. 0 Torque boost setting by increasing with
0.5% increments for the low-speed operation.
59
Change the control method to Advanced magnetic
flux vector control or Real sensorless vector control.
63
Hunting occurs by the generated vibration, for
example, when structural rigidity at load side is
insufficient.
Disable automatic control functions, such as the
energy saving operation, the fast-response current
limit function, the torque limit, the regeneration
avoidance function, Advanced magnetic flux vector
control, Real sensorless vector control, vector control,
encoder feedback control, droop control, the stall
prevention, online auto tuning, the notch filter, and
orientation control.
During the PID control, set smaller values to Pr.129
PID proportional band and Pr.130 PID integral time.
Lower the control gain, and adjust to increase the
stability.
—
Change Pr. 72 PWM frequency selection setting. 113




































































































































































































































































