



















80
Before operation
(5) When using a multi-pole motor (8 poles or more)
Specially when using a multi-pole motor with more than 8 poles under Real sensorless vector control or vector control,
adjust Pr. 820 Speed control P gain 1 and Pr. 824 Torque control P gain 1 according to the motor referring to the following
methods.
·For Pr. 820 Speed control P gain 1, increasing the setting value improves the response level, but a too large gain will
produce vibration and/or unusual noise.
·For Pr. 824 Torque control P gain 1, note that a too low value will produce current ripples, causing the motor to generate
sound synchronizing the cycle of current ripples.
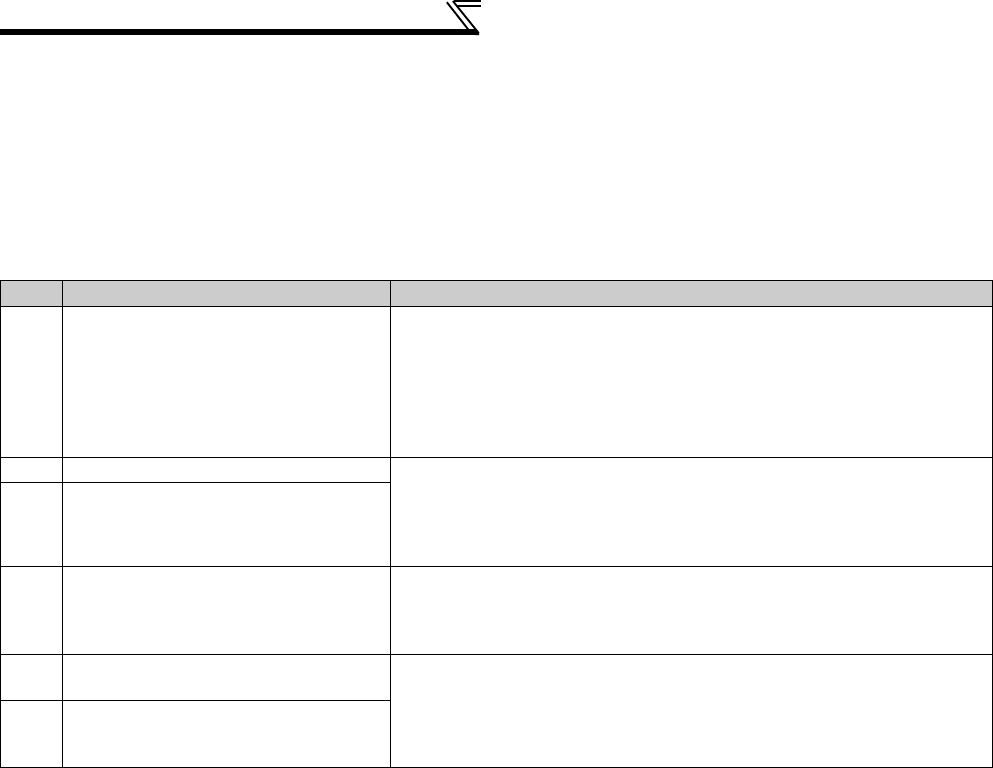
Adjustment method
No. Phenomenon/Condition Adjustment Method
1
The motor rotation is unstable in the low
speed range.
Set a higher value in Pr. 820 Speed control P gain 1 according to the motor
inertia.
Since the self inertia of a multi-pole motor tends to become large, make
adjustment to improve the unstable phenomenon, then make fine adjustment
in consideration of the response level using that setting as reference.
In addition, when performing vector control with encoder, gain adjustment
according to the inertia can be easily done using easy gain tuning (Pr. 819 = 1).
2 Speed trackability is poor. Set a higher value in Pr. 820 Speed control P gain 1.
Increase the value 10% by 10% until just before vibration or unusual noise is
produced, and set about 0.8 to 0.9 of that value.
If you cannot make proper adjustment, increase the value of Pr. 821 Speed
control integral time 1 double by double and make adjustment of Pr. 820 again.
3
Speed variation at the load fluctuation is
large.
4
Torque becomes insufficient or torque
ripple occurs at starting or in the low
speed range under Real sensorless
vector control.
Set the speed control gain a little higher. (same as No. 1)
If the problem still persists after gain adjustment, increase Pr. 13 Starting
frequency or set the acceleration time shorter if the inverter is starting to avoid
continuous operation in the ultra low speed range.
5
Unusual motor and machine vibration,
noise or overcurrent occurs.
Set a lower value in Pr. 824 Torque control P gain 1.
Decrease the value 10% by 10% until just before the phenomenon is
improved, and set about 0.8 to 0.9 of that value.
6
Overcurrent or overspeed (E.OS) occurs
at a start under Real sensorless vector
control.