136
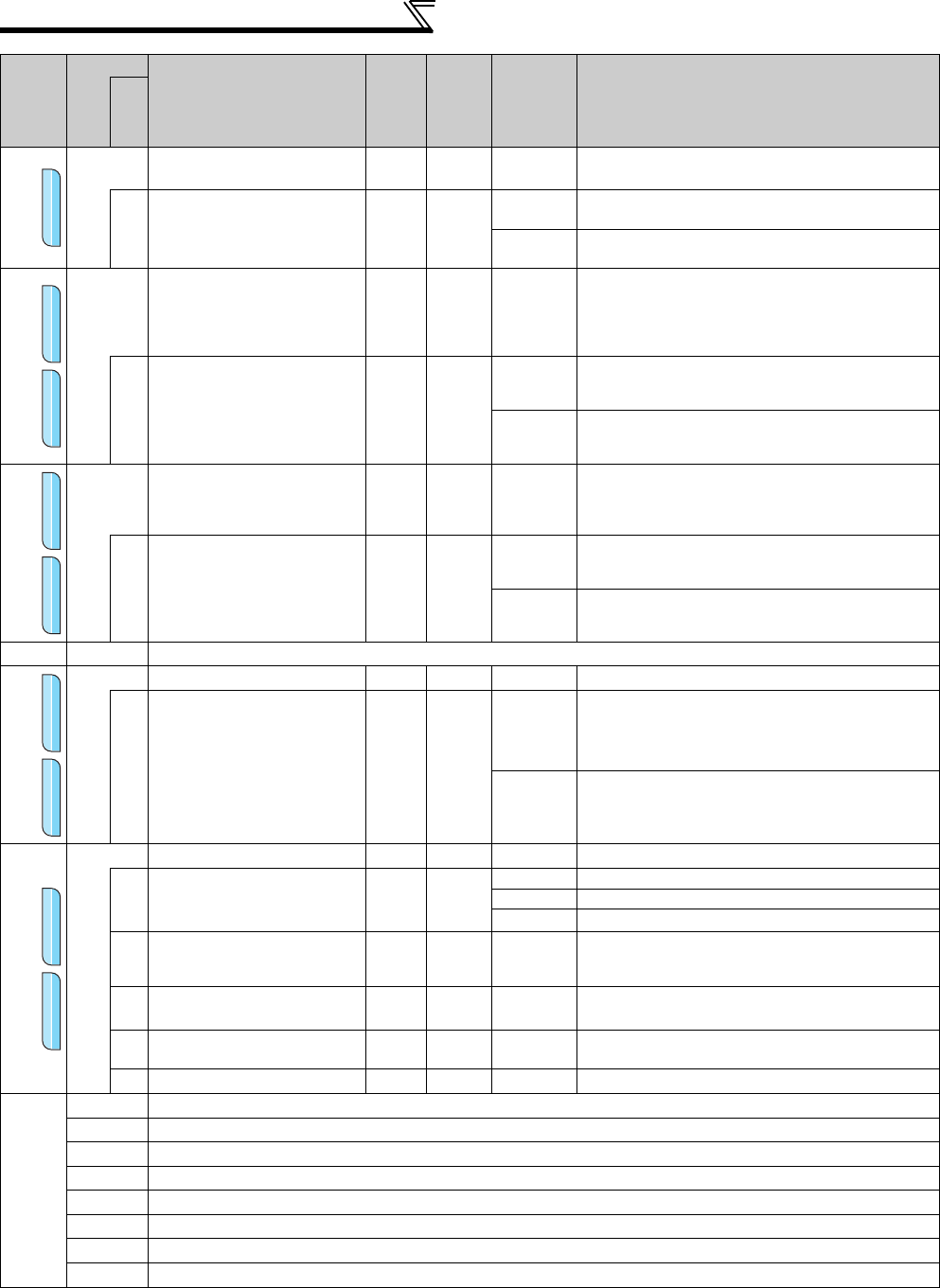
Parameter List
Speed detection
filter function
823
Speed detection
filter 1
0.001s 0.001s 0 to 0.1s Set the primary delay filter for the speed feedback.
833
Speed detection
filter 2
0.001s 9999
0 to 0.1s
Second function of Pr. 823 (valid when RT signal is
on)
9999 No function
Current loop
proportional gain setting
824
Torque control P gain 1
1% 100% 0 to 200%
Set the proportional gain for the current control of the
q and d axes. (Increasing the value improves
trackability in response to a current command
change and reduces current variation with
disturbance.)
834
Torque control P gain 2
1% 9999
0 to 200%
Second function of Pr. 824 (valid when the RT
terminal is on)
9999 No function
Current control
integral time setting
825
Torque control integral time
1
0.1ms 5ms 0 to 500ms
Set the integral time for the current control of the q
and d axes. (Decreasing the value shortens the time
taken to return to the original torque if current
variation with disturbance occurs.)
835
Torque control integral time
2
0.1ms 9999
0 to 500ms
Second function of Pr. 825 (valid when the RT signal
is on)
9999 No function
—
826
Refer to Pr. 74.
Torque detection
filter function
827
Torque detection filter 1
0.001s 0s 0 to 0.1s Set the primary delay filter for the current feedback.
837
Torque detection filter 2
0.001s 9999
0 to 0.1s
Second function of Pr. 827 (valid when the RT signal
is on)
9999 No function
Speed feed forward control,
model adaptive speed control
828
Model speed control gain
1% 60% 0 to 1000% Set the gain for model speed controller.
877
Speed feed forward control/
model adaptive speed
control selection
10
0 Normal speed control is exercised
1 Speed feed forward control is exercised.
2 Model adaptive speed control is enabled.
878
Speed feed forward filter
0.01s 0s 0 to 1s
Set the primary delay filter for the speed feed forward
result calculated using the speed command and load
inertia ratio.
879
Speed feed forward torque
limit
0.1% 150% 0 to 400%
Limits the maximum value of the speed feed forward
torque.
880
Load inertia ratio
0.1 7
0 to 200
times
Set the load inertia ratio.
Inertia ratio found by easy gain turning.
881
Speed feed forward gain
1% 0% 0 to 1000% Set the feed forward calculation result as a gain.
—
830
Refer to Pr. 820.
831
Refer to Pr. 821.
832
Refer to Pr. 74.
833
Refer to Pr. 823.
834
Refer to Pr. 824.
835
Refer to Pr. 825.
836
Refer to Pr. 74.
837
Refer to Pr. 827.
Func
t
ion
Parameter
Name
Incre
ments
Initial
Value
Range Description
Related
parameters
Vector
Vector
Sensorless
Sensorless
Vector
Vector
Sensorless
Sensorless
Vector
Vector
Sensorless
Sensorless
Vector
Vector
Sensorless
Sensorless
Vector
Vector




































































































































































































































































