



















82
Before operation
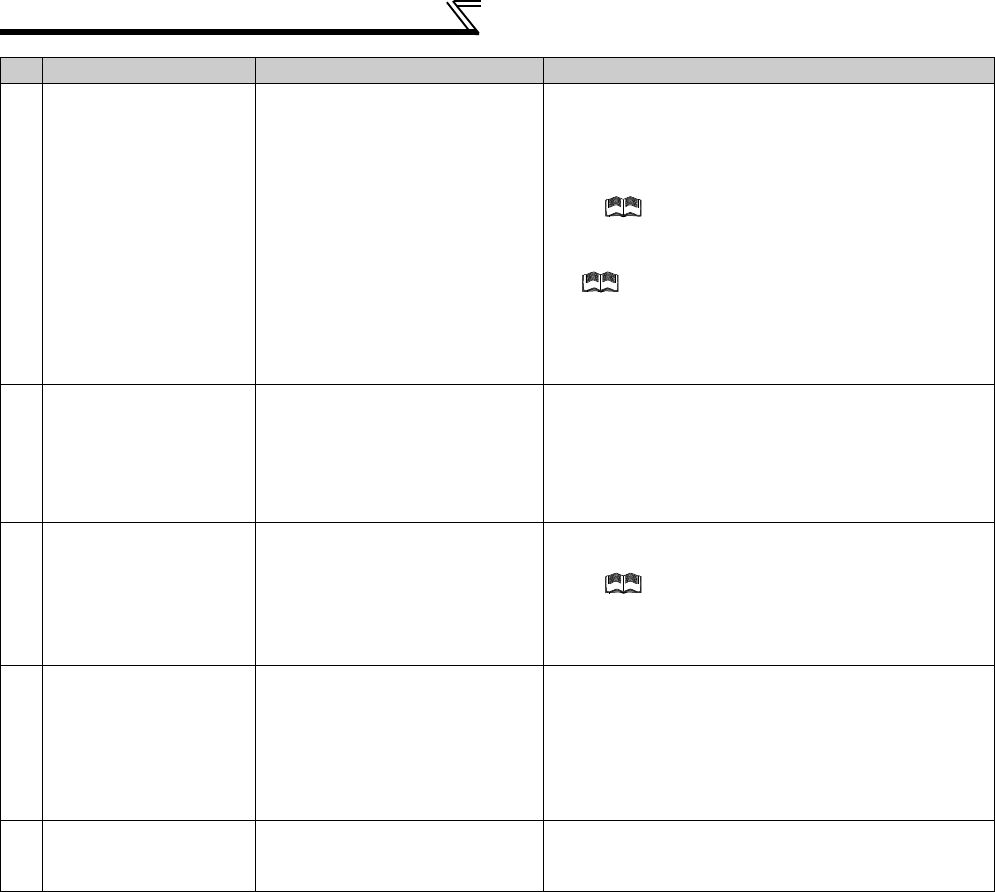
4 Motor speed is unstable.
(1) The speed command varies. (1) -1 Check that a correct speed command comes from
the command device. (Take measures against
noises.)
(1) -2 Decrease Pr. 72 PWM frequency selection.
(1) -3 Increase
Pr. 822 Speed setting filter 1
.
(Refer to Chapter 4 of
the Instruction Manual (Applied) )
(2) Insufficient torque. (2) Increase the torque limit value.
(Refer to torque limit of speed control on
Chapter 4 of
the Instruction Manual (Applied
) )
(3) The speed control gains do not
match the machine. (mechanical
resonance)
(3) -1 Perform easy gain tuning. (Refer to page 77 )
(3) -2 Adjust Pr. 820, Pr. 821. (Refer to page 79)
(3) -3 Perform speed feed forward/model adaptive speed
control.
5
Motor or machine hunts
(vibration/noise is
produced).
(1) The speed control gain is high. (1) -1 Perform easy gain tuning. (Refer to page 77)
(1) -2 Decrease Pr. 820 and increase Pr. 821.
(1) -3 Perform speed feed forward control and model
adaptive speed control.
(2) The torque control gain is high. (2) Decrease the Pr. 824 value.
(3) The motor wiring is wrong. (3) Check the wiring
6
Acceleration/deceleration
time does not match the
setting.
(1) Insufficient torque. (1) -1 Increase the torque limit value.
(Refer to torque limit of speed control on
Chapter 4 of
the Instruction Manual (Applied
) )
(1) -2 Perform speed feed forward control.
(2) Large load inertia. (2) Set the acceleration/deceleration time that meets the
load.
7
Machine operation is
unstable.
(1) The speed control gains do not
match the machine.
(1) -1 Perform easy gain tuning. (Refer to page 77)
(1) -2 Adjust Pr. 820, Pr. 821. (Refer to page 79)
(1) -3 Perform speed feed forward control and model
adaptive speed control.
(2) Slow response because of
improper acceleration/
deceleration time of the inverter.
(2) Change the acceleration/deceleration time to an
optimum value.
8
Speed fluctuates at low
speed.
(1) Adverse effect of high carrier
frequency.
(1) Decrease Pr. 72 PWM frequency selection.
(2) Low speed control gain. (2) Increase Pr. 820 Speed control P gain 1.
Phenomenon Cause Countermeasures