



















209
332
RS-485 communication
speed
20 A0 3
{ { {{{{{{
{
*6
{
*6
333
RS-485 communication stop
bit length
21 A1 3
{ { { { { { { {
{
*6
{
*6
334
RS-485 communication
parity check selection
22 A2 3
{ { {{{{{{
{
*6
{
*6
335
RS-485 communication
retry count
23 A3 3
{ { { { { { { {
{
*6
{
*6
336
RS-485 communication
check time interval
24 A4 3
{ { {{{{{{
{
*6
{
*6
337
RS-485 communication
waiting time setting
25 A5 3
{ { { { { { { {
{
*6
{
*6
338
Communication operation
command source
26 A6 3
{ { {{{{{{
{
*6
{
*6
339
Communication speed
command source
27 A7 3
{ { { { { { { {
{
*6
{
*6
340
Communication startup
mode selection
28 A8 3
{ { {{{{{{
{
*6
{
*6
341
RS-485 communication CR/
LF selection
29 A9 3
{ { { { { { { {
{
*6
{
*6
342
Communication EEPROM
write selection
2A AA 3
{ { {{{{{{{{
343
Communication error count
2B AB 3
{ { { { { { {
× × ×
345
DeviceNet address
2D AD 3
{ { {{{{{{
{
*6
{
*6
346
DeviceNet baud rate
2E AE 3
{ { { { { { { {
{
*6
{
*6
349
Communication reset
selection
31 B1 3
{ { {{{{{{
{
*6
{
*6
350
Stop position command
selection
32 B2 3
{ { { × × × × { { {
351
Orientation speed
33 B3 3
{{{
××××
{{{
352
Creep speed
34 B4 3
{ { {
× × × ×
{ { {
353
Creep switchover position
35 B5 3
{{{
××××
{{{
354
Position loop switchover
position
36 B6 3
{ { { × × × × { { {
355
DC injection brake start
position
37 B7 3
{{{
××××
{{{
356
Internal stop position
command
38 B8 3
{ { {
× × × ×
{ { {
357
Orientation in-position
zone
39 B9 3
{{{××××{{{
358
Servo torque
selection
3A BA 3
{ { {
× × × ×
{ { {
359
Encoder rotation direction
3B BB 3
{ { {{{
××
{{{
360
16 bit data selection
3C BC 3
{ { {
× × × ×
{ { {
361
Position shift
3D BD 3
{{{××××{{{
362
Orientation position loop
gain
3E BE 3
{ { {
× × × ×
{ { {
363
Completion signal output
delay time
3F BF 3
{{{××××{{{
364
Encoder stop check time
40 C0 3
{ { {
× × × ×
{ { {
365
Orientation limit
41 C1 3
{{{
××××
{{{
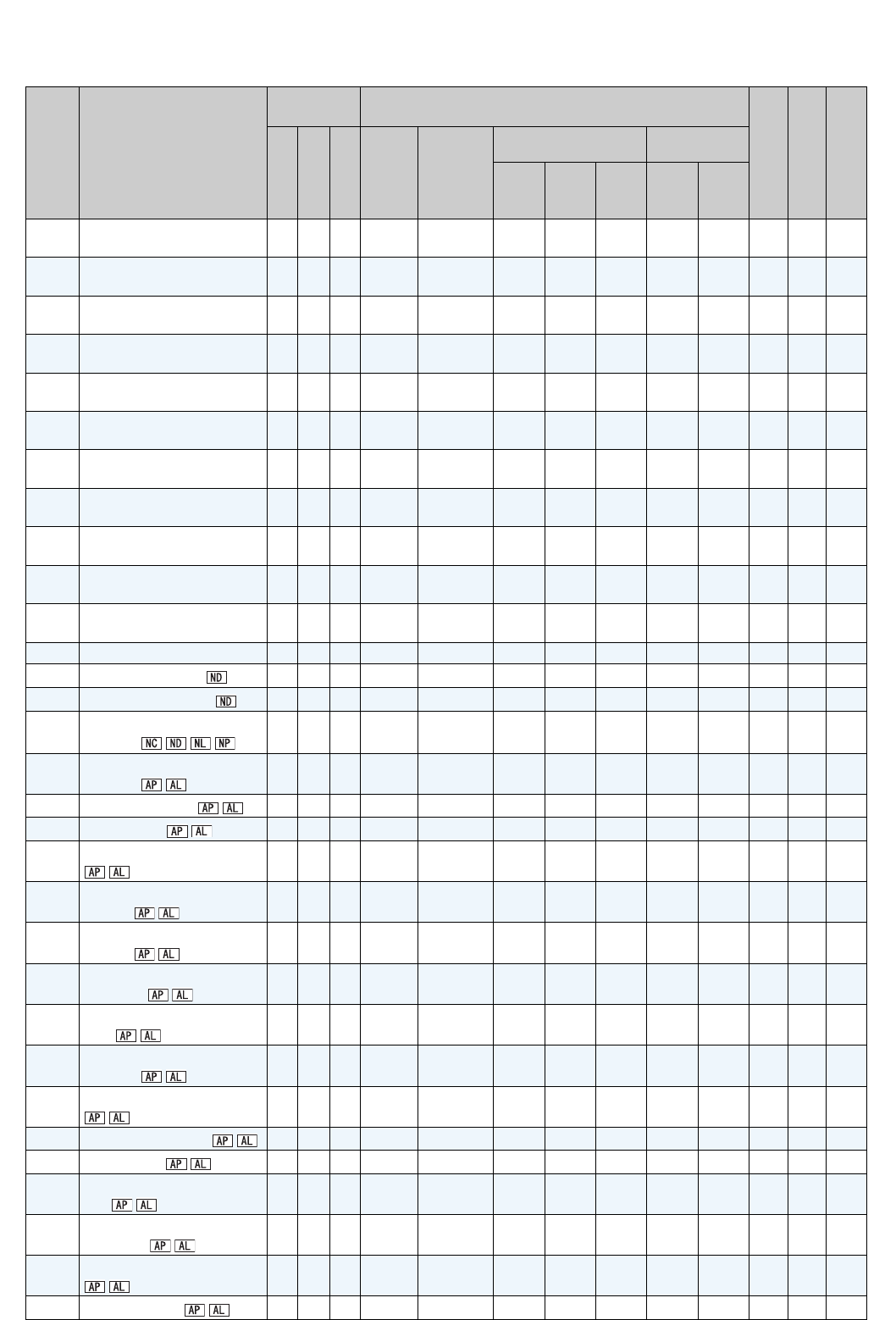
Param
eter
Name
Instruction
Code
* 1
Control Mode-based Correspondence Table *2
Parameter Copy
*3
Parameter Clear
*3
All Parameter Clear
*3
Read
Write
Extended
V/F
Control
Advanced
magnetic
flux
vector
control
Vector control
Real sensorless
vector control
Speed
control
Torque
control
Position
control
Speed
control
Torque
control