



















4/28 BCN-C22005-675
(2) PM sensorless vector control display and PM sensorless vector control signal
P.RUN on the operation panel (FR-DU07) is lit and the PM sensorless vector control signal (IPM) is output
during PM sensorless vector control.
For the terminal to output the PM sensorless vector control signal, assign the function by setting "57 (positive
logic)" or "157 (negative logic)" in any of Pr.190 to Pr.196 (Output terminal function selection).
(3) Loss of synchronism detection
1.2 Initializing the parameters required for the PM sensorless vector control
(Pr.998)
*1 This parameter allows its setting to be changed in any operation mode even if "0 (initial value)" is set in Pr. 77 Parameter write selection.
*2 To use an IPM motor other than MM-CF, offline auto tuning must be performed for the IPM motor.
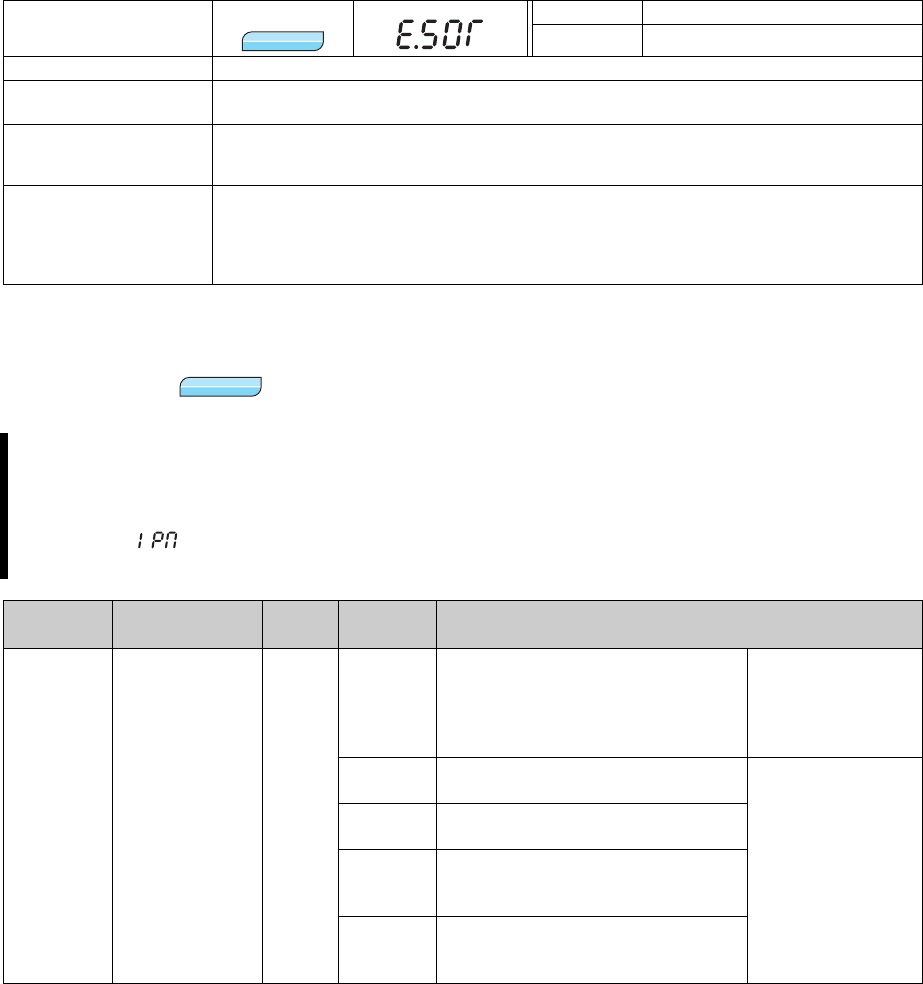
Operation Panel
Indication
E.SOT
FR-PU04 Fault 14
FR-PU07 Motor step out
Name
Loss of synchronism detection
Description
Stops the output when the operation is not synchronized. (This function is only available
under PM sensorless vector control.)
Description
· Check that the IPM motor is not driven overloaded.
· Check if a start command is given to the inverter while the IPM motor is coasting.
· Check if a motor other than the IPM motor (MM-CF series) is driven.
Corrective action
· Set the acceleration time longer.
· Reduce the load.
· If the inverter restarts during coasting, set Pr.57 Restart coasting time "9999," and select
the automatic restart after instantaneous power failure.
· Drive an IPM motor (MM-CF series).
· By performing IPM parameter initialization, PM sensorless vector control is selected and the
parameters, which are required to drive an IPM motor, are selected. Initial settings and setting ranges
of the parameters are adjusted automatically to drive an IPM motor.
· Two IPM parameter initialization methods are available; setting Pr.998 IPM parameter initialization, and
selecting (IPM parameter initialization) mode on the operation panel. One of the two methods
can be selected.
Parameter
number
Name
Initial
value
Setting
range
Description
998 *1
IPM parameter
initialization
0
0
Parameter settings for a general-
purpose motor (frequency)
Initial parameter
settings required to
drive a general-
purpose motor are
set.
3003
Parameter settings for an MM-CF IPM
motor (rotations per minute)
Initial parameter
settings required to
drive an IPM motor
are set.
3103
Parameter settings for an MM-CF IPM
motor (frequency)
8009
Parameter (rotations per minute)
settings for an IPM motor other than
MM-CF (after tuning)
*2
8109
Parameter (frequency) settings for an
IPM motor other than MM-CF (after
tuning)
*2
bcnc22005635.fm 4 ページ 2014年12月11日 木曜日 午後5時59分