



















163
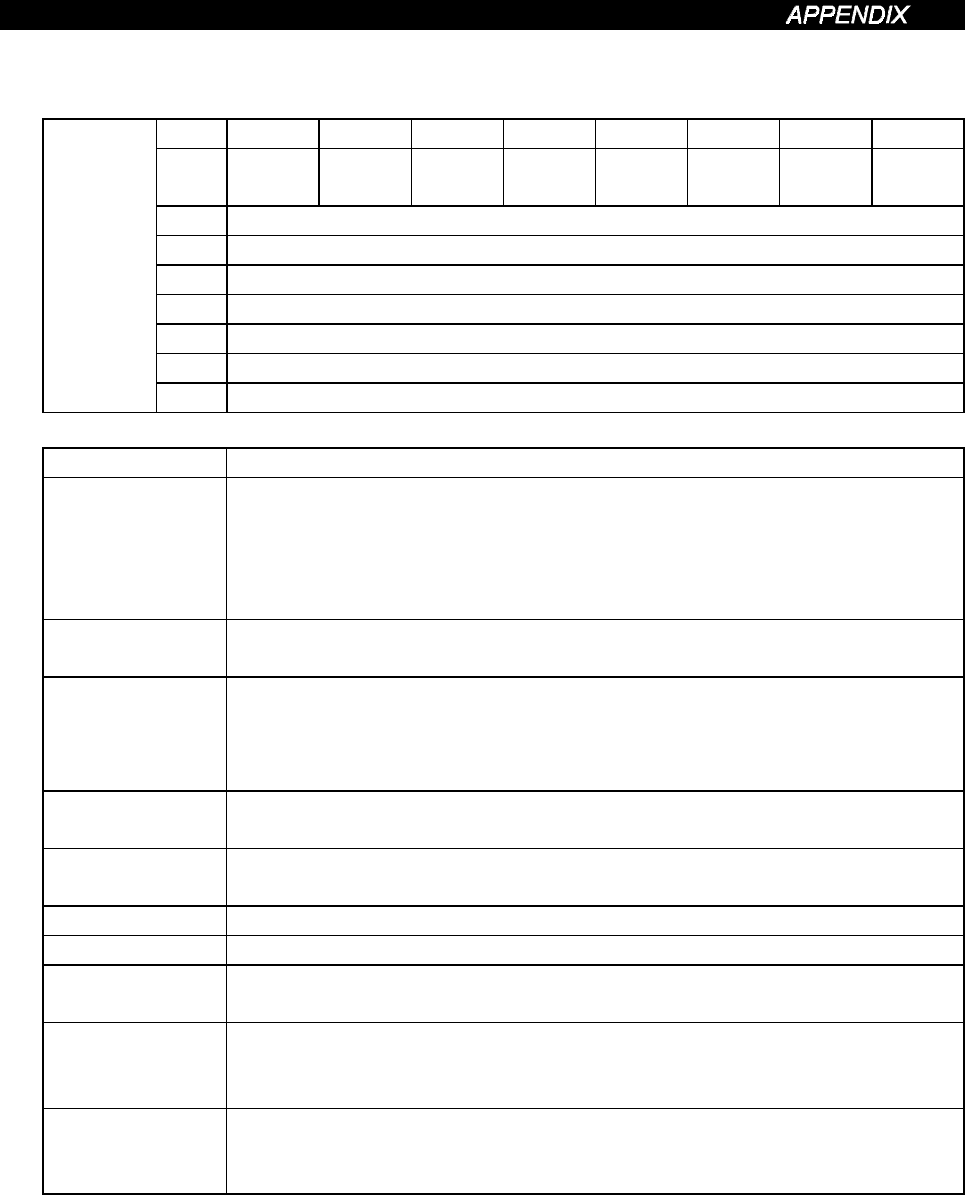
(8) Class 0x04 - Output Instance 100
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
Write
Param
Net
Ref
Net
Ctrl
−
MRS
Fault
Reset
Run
Rev
Run
Fwd
10x00
2 Speed Reference (Low Byte)
3 Speed Reference (High Byte)
4 Acceleration Time (Low Byte)
5 Acceleration Time (High Byte)
6 Deceleration Time (Low Byte)
Output
Instance
0x64
100
7 Deceleration Time (High Byte)
Data Name Contents
Write Param
1: The acceleration/deceleration time value is the value set with Byte
4, Byte 5, Byte 6 and Byte 7.
(As this is written while running, writing is enabled only when Pr. 77
is 2.)
0: The acceleration/deceleration time value is not written.
Net Ref
1: The speed reference is the value set with Byte 2 and Byte 3.
0: The speed reference is the value set from the parameter unit.
Net Ctrl
1: MRS, Fault Reset, Run Rev and Run Fwd are operated with
communications.
0: MRS, Fault Reset, Run Rev and Run Fwd are operated with the
inverter.
Fault Reset
If Fault Reset makes a transition from 0 to 1 and there is an error in
the inverter, the inverter will reset.
MRS
1: The inverter output is shut off.
0: The inverter output shut off is canceled.
Run Rev If Run Rev is 1 and Run Fwd is 0, runs in reverse direction.
Run Fwd If Run Fwd is 1 and Run Rev is 0, runs in forward direction.
Speed
Reference
Byte 2: Low-order byte of speed reference.
Byte 3: High-order byte of speed reference.
Acceleration
Time
Byte 4: Low-order byte of acceleration time.
Byte 5: High-order byte of acceleration time.
(Acceleration time = Pr. 7)
Deceleration
Time
Byte 6: Low-order byte of deceleration time.
Byte 7: High-order byte of deceleration time.
(Deceleration time = Pr. 8)