



















95
Output terminal functions (Pr. 41 to Pr. 50)
PARAMETERS
3
3.6 Output terminal functions (Pr. 41 to Pr. 50)
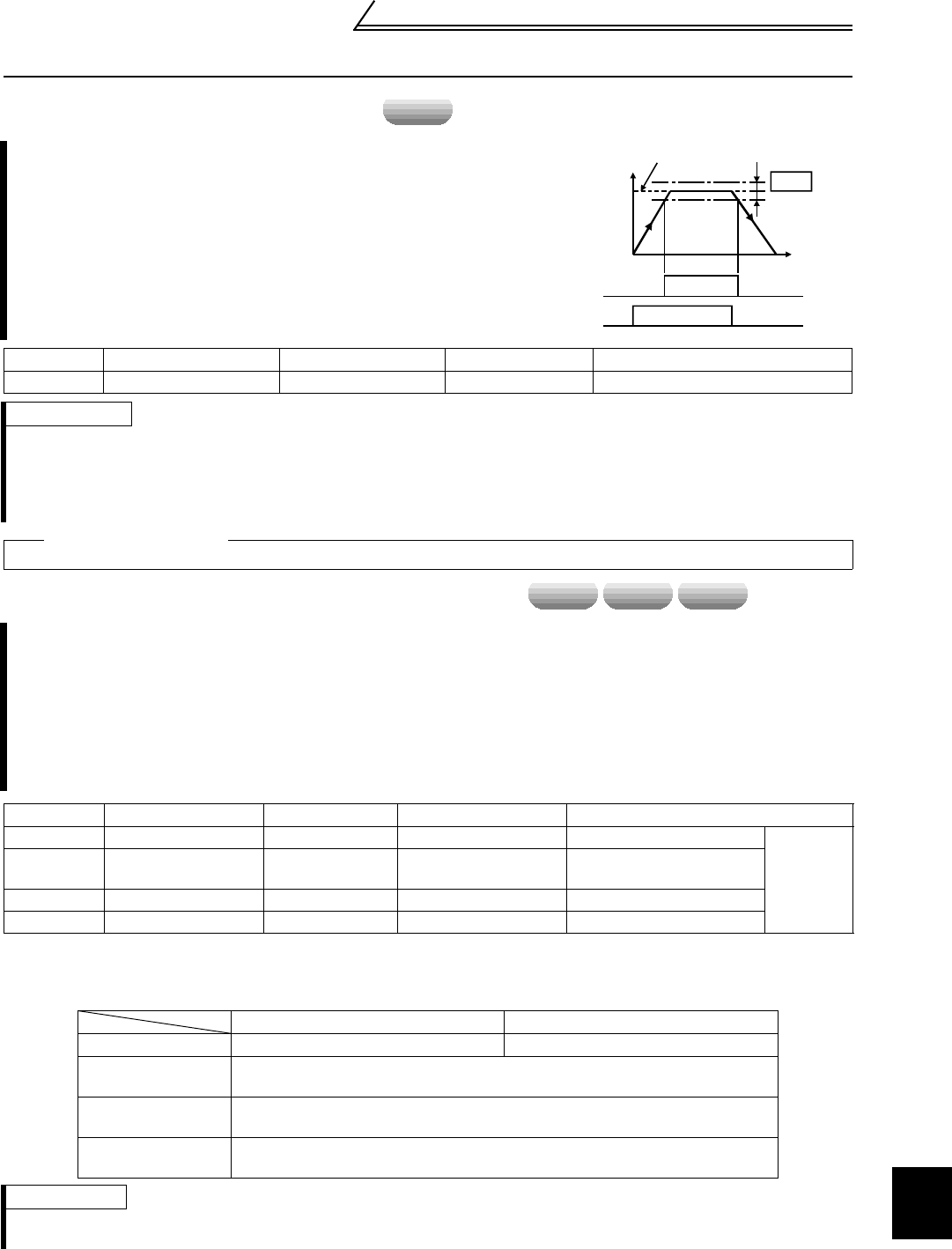
3.6.1 Up-to-speed sensitivity (Pr. 41 )
3.6.2 Speed detection (Pr. 42, Pr. 43, Pr. 50, Pr. 116 )
(1) Signal operation
The FU, FU2 and FU3 signals function under speed/V/F control. They do not function under torque/position
control.
You can adjust the ON range of the up-to-speed signal (SU)
output when the output speed reaches the running speed.
This parameter can be used to confirm that the running speed
has been reached and used as the operation start signal etc. for
related equipment.
• Under vector control with encoder: Actual motor speed
(feedback value) is adjusted.
Parameter Name Factory Setting Setting Range Remarks
41 Up-to-speed sensitivity 10% 0 to 100% Extended mode
REMARKS
• Assign functions to the terminals DO1 to DO3 and ABC to use the SU signal. The SU signal is assigned to the terminal DO2
when shipped from the factory. Use any of Pr. 190 to Pr. 192 and Pr. 195 to change the terminal functions. Changing the
terminal assignment with any of Pr. 190 to Pr. 192 and Pr. 195 may affect the other functions. Check the functions of the
corresponding terminals before making setting. (Refer to page 152.)
• For V/F control, the motor runs at the speed converted from the output frequency.
Related parameters
• SU signal terminal assignment ⇒ Set "1" in any of Pr. 190 to Pr. 192 and Pr. 195 (output terminal function selection) (Refer to page 152.)
When the speed reaches or exceeds the setting, the output speed detection signal (FU, FU2, FU3 signal) or
speed detection signal (FB, FB2, FB3 signal) is output.
• This function can be used for electromagnetic brake operation, open signal, etc.
• You can also set speed detection used exclusively for reverse rotation.
• This function is effective for changing the timing of electromagnetic brake operation between forward
rotation (rise) and reverse rotation (fall) during elevator operation, etc.
zThe FU signal is output when the speed has reached the output speed.
zThe FB signal is output when the speed has reached the detected actual motor speed (feedback value).
Parameter Name Factory Setting Setting Range Remarks
42 Speed detection 300r/min 0 to 3600r/min ————
Extended
mode
43
Speed detection for
reverse rotation
9999 0 to 3600r/min, 9999 9999: Same as Pr. 42 setting
50 Second speed detection 750r/min 0 to 3600r/min ————
116 Third speed detection 1500r/min 0 to 3600r/min ————
FU FB
Compared signals Speed command value Actual motor speed
FU/FB signal
Forward rotation: On when speed is equal to or higher than in Pr. 42
Reverse rotation: On when speed is equal to or higher than in Pr. 43
FU2/FB2 signal
On when speed is equal to or higher than in Pr. 50 (both forward and reverse)
Off when speed is lower than in Pr. 50 (both forward and reverse)
FU3/FB3 signal
On when speed is equal to or higher than in Pr. 116 (both forward and reverse)
Off when speed is lower than in Pr. 116 (both forward and reverse)
REMARKS
For V/F control, on/off control is exercised at the speed converted from the output frequency. (The detection actions of the FU
and FB signals are the same.)
speed
Running speed Adjustable range
Time
Start signal
Output
speed
(r/min)
Pr.41
OFF
ON OFF
ON
OFF
Output signal
(SU)
speed torque position