184
Protective functions (Pr. 870 to Pr. 874)
<Detailed operation>
The following table indicates the functional combinations of terminals 1, 2 and 3.
Basically, the analog multiple functions are assigned to the terminal 1 alone and only one function may be selected
for the multi-function analog input.
When the PID control function is selected, the terminal 2 is used for the PID set point. For PID control, refer to
page 139.
When the torque bias function is selected, the terminal 3 is used for the torque bias input.
3.37 Protective functions (Pr. 870 to Pr. 874)
3.37.1 Speed deviation excessive (Pr. 870, Pr. 871 )
Control
Method
Terminal 2
Speed Command/
Speed Limit/
PID Set Point
Terminal 3
Torque Limit/Torque
Command/Torque Bias
Terminal 1
Multi-function
Remarks
Speed
control
Speed command
No function
(Pr. 810 = 0, Pr. 840 = 9999)
Speed auxiliary setting
(Reversible operation also possible)
Factory-set status
Magnetic flux command
Torque limit
(Pr. 810 = 1)
Speed auxiliary setting
(Reversible operation also possible)
Magnetic flux command
Regenerative torque limit
Setting can be made
when Pr. 810 = 1.
Torque bias
(Pr. 810 = 0, Pr. 840 = 1,2,3)
Speed setting auxiliary
Magnetic flux command
PID
control
(Speed
control)
PID set point
No function
(Pr. 810 = 0)
PID measured value
PID deviation signal
Torque limit
(Pr. 810 = 1)
PID measured value
PID deviation signal
Torque
control
Speed limit
Torque command
Speed limit auxiliary input
Magnetic flux command
No function
Forward/reverse rotation speed limit
(analog polarity switchover speed
limit)
Setting can be made
when Pr. 807 = 2.
Position
control
No function
No function (Pr. 810 = 0)
No function
Magnetic flux command
Torque limit
(Pr. 810 = 1)
No function
Magnetic flux command
Regenerative torque limit
Setting can be made
when Pr. 810 = 1.
REMARKS
Magnetic flux command is a function used to command magnetic flux (strength of magnetic flux) from the external analog
terminal (1). In addition to torque command "terminal 3", the inverter can control torque using magnetic flux as a command.
For example, the characteristic of motor torque is that output torque is constant independently of the output speed when
exercising line feed/tension constant control on a winder, unwinder, etc. Constant power control by variable magnetic flux,
equivalent to field excitation control of the DC shunt motor, can be exercised.
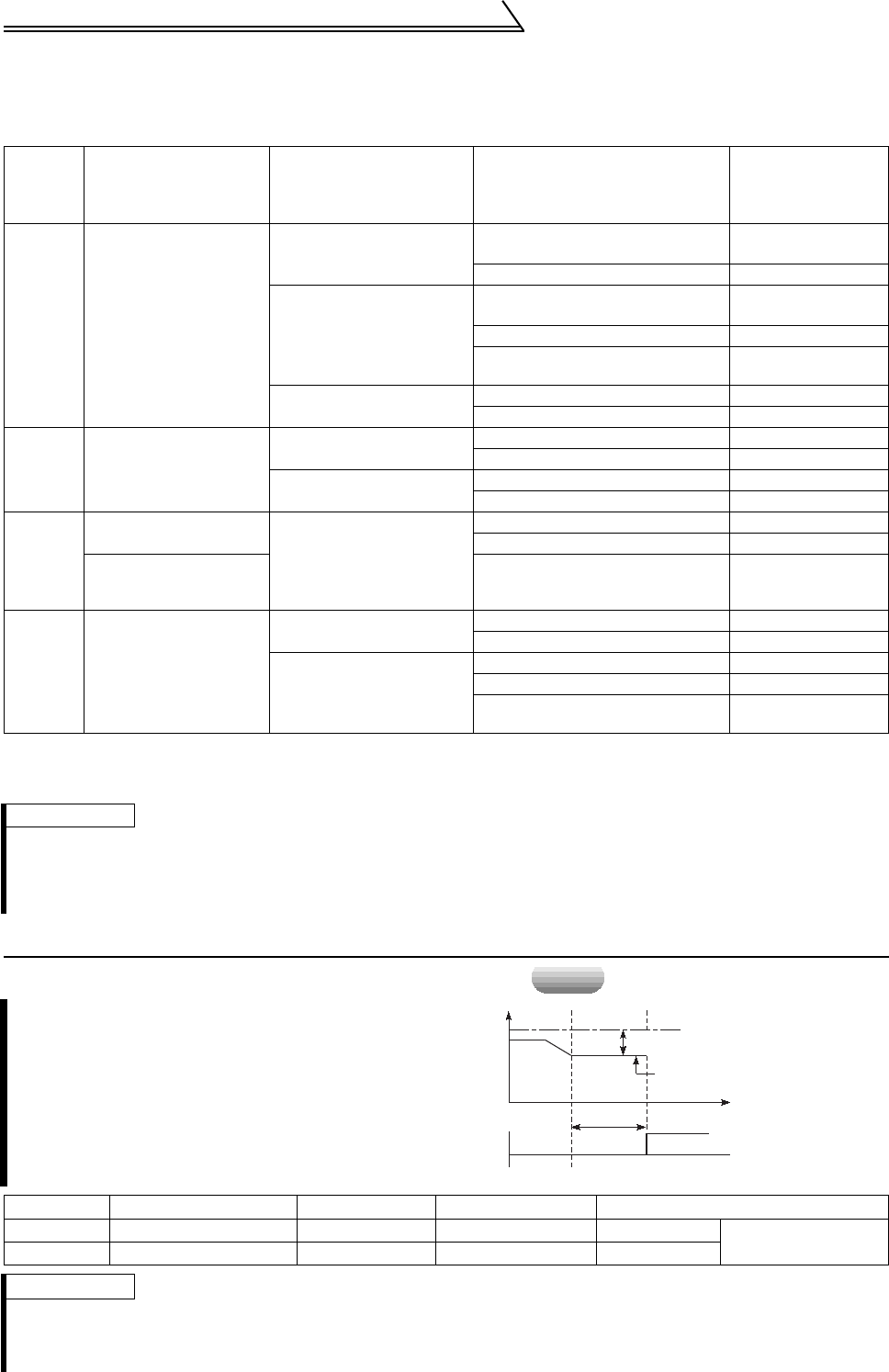
z If the difference (absolute value) between the
speed command value and actual speed
exceeds the Pr. 870 "speed deviation level"
setting for longer than the time set in Pr. 871
"speed deviation time", speed deviation
excessive occurs and error "E. OSD" appears,
resulting in a stop.
Parameter Name Factory Setting Setting Range Remarks
870 Speed deviation level 9999 0 to 1500r/min, 9999 9999:Invalid
Extended mode
871 Speed deviation time 12s 0 to 100s - - -
REMARKS
1. Set these parameters when a speed difference will pose a problem.
2. This function is activated only under vector control.
3. When the motor with encoder is driven, setting the Pr. 851 "number of encoder pulses" value that is different from the
actual number of encoder pulses may make control unstable, resulting in "E. OSD" (even if Pr. 870 = 9999).
speed
(r/min)
Set speed
Actual speed
Time
Speed deviation
excessive error activated
(E. OSD)
ONOFF
larm output
(across A-C)
Speed
Pr. 871
Pr. 870









































































































































































































































