158
Droop (Pr. 286 to Pr. 288)
3.26 Droop (Pr. 286 to Pr. 288)
3.26.1 Droop control (Pr. 286 to Pr. 288 )
z Speed limitter after droop compensation
This function is designed to balance the load in proportion to the load torque to provide the speed drooping
characteristic.
This function is effective for balancing the load when using multiple inverters
z The speed command is varied according to the magnitude of the motor load (load meter of the inverter).
The drooping amount at the rated torque is set by the droop gain as a percentage using the rated speed as
a reference.
z Droop control is made valid when Pr. 286 is other than "0".
Parameter Name
Factory
Setting
Setting
Range
Remarks
286 Droop gain
0
% 0 to 100%
The drooping amount at the rated torque is set by the droop gain
as a percentage using the rated speed as a reference.
When the setting value is "0", the function will be invalid.
287
Droop filter time
constant
0.3s
0.00 to
1.00s
Set the time constant of the primary delay filter applied to the
torque current.
288
Droop function
activation selection
0
0 Droop control is not exercised during acceleration/deceleration.
1
Droop control is always exercised during operation.
(with zero limit)
2
Droop control is always exercised during operation
(without zero limit)
Pr. 288 setting Description
0
Droop control is not excercised during acceleration/deceleration. Note that the speed command after
droop is stopped at 0r/min if the speed command after droop is negative.
1
Droop control is always excercised during operation. Note that, during vector control with encoder, the
speed command after droop is stopped at 0r/min if the speed command after droop is negative.
2
Droop control is always excercised during operation. Note that the speed command after droop is not
stopped at 0r/min even if the speed command after droop is negative.
Pr. 342 Refer to Pr. 117 (page 128).
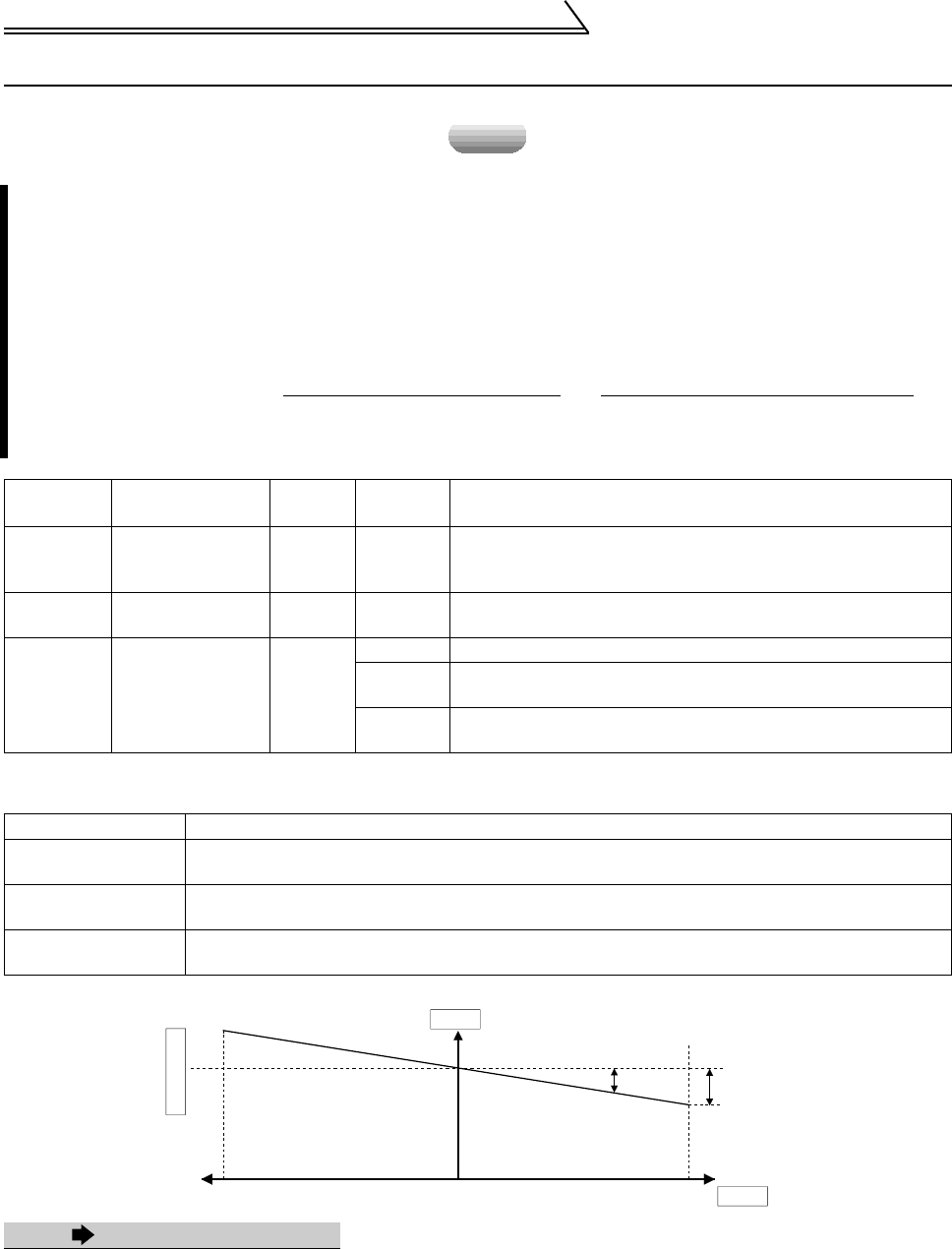
speed
Droop compensation
speed
=
Amount of torque current after
filtering
×
Rated speed × droop gain
100% torque amount current 100
Droop compensation speed
Rated speed
Speed
100%
Droop gain
0
Torque
-100%









































































































































































































































