



















78
Basic functions (Pr. 0 to Pr. 9)
<Setting>
• Set the running speeds in the corresponding parameters.
Each speed can be set as desired in the range 0 to 3600r/min during inverter operation.
With any multi-speed setting parameter being read, press to change the setting.
In this case, press to store the preset speed. (This is also enabled in the external mode.)
Pressing reflects the preset speed.
3.3.5 Acceleration and deceleration time
(Pr. 7, Pr. 8, Pr. 20, Pr. 21, Pr. 44, Pr. 45, Pr. 110, Pr. 111 )
Parameter Name Factory Setting Setting Range Remarks
4 Multi-speed setting (high speed) 1500r/min 0 to 3600r/min Simple mode
5
Multi-speed setting
(middle speed)
750r/min 0 to 3600r/min Simple mode
6 Multi-speed setting (low speed) 150r/min 0 to 3600r/min Simple mode
24 to 27
Multi-speed setting
(speeds 4 to 7)
9999
0 to 3600r/min,
9999
"9999" No setting
232 to 239
Multi-speed setting
(speeds 8 to 15)
9999
0 to 3600r/min,
9999
"9999" No setting
REMARKS
• Press when the FR-PU04V (option) is used.
• Use Pr. 180 to Pr. 183 and Pr. 187 to assign the terminals used for signals RH, RM, RL, and REX. (*)
*Changing the terminal assignment using Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) may affect the other
functions. Please make setting after confirming the function of each terminal.
• The priorities of the external terminals for speed commands are as follows.
Jog > pulse train input (option FR-A5AP) > digital setting (option FR-A5AX) > multi-speed operation > PID > terminal 2
CAUTION
1. The multi-speed settings override the main speed (across terminals 2-5).
2. The multi-speeds can also be set in the PU or external operation mode.
3. For 3-speed setting, if two or more speeds are simultaneously selected, priority is given to the preset
speed of the lower signal. (RL > RM > RH)
4. Pr. 24 to Pr. 27 and Pr. 232 to Pr. 239 settings have no priority between them.
5. The settings can also be changed during operation.
6. When the jog signal is used with multi-speed signals, the jog signal has priority.
Related parameters
• Maximum, minimum speed setting⇒ Pr. 1 "maximum speed", Pr. 2 "minimum speed" (Refer to page 76.)
• Signal RH, RM, RL, REX terminal assignment
⇒ Pr. 180 to Pr. 183, Pr. 187 (input terminal function selection) (Refer to page 150.)
• External operation mode setting
⇒ Pr. 79 "operation mode selection" (Refer to page 117.)
• Extended mode/simple mode setting
⇒ Pr. 160 "extended function selection" (Refer to page 150.)
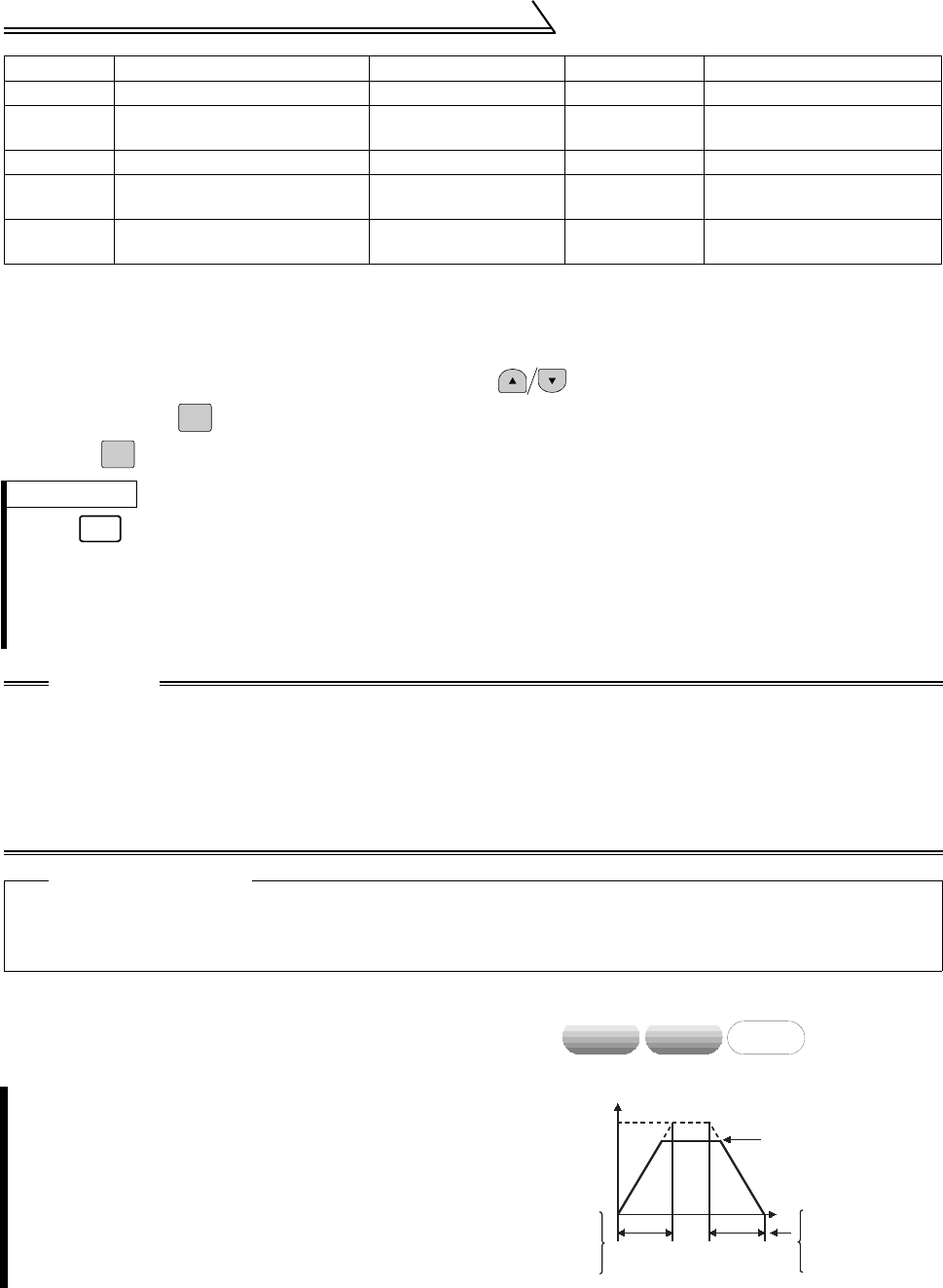
Set the acceleration/deceleration time of the motor
during speed control and position control by
parameter setting.
Set a larger value for a slower speed increase/
decrease or a smaller value for a faster speed
increase/decrease.
Under torque control, the speed limit value varies
with the acceleration/deceleration time.
SET
SET
WRITE
speed torque
position
Output speed
(r/min)
Running speed
(speed limit value)
Acceleration
time
Deceleration
time
Time
Pr.20
Pr.7
Pr.44
Pr.110
Pr.8
Pr.45
Pr.111
Acceleration
Constant
speed Deceleration