



















46
Fine adjustment of gains for speed control
2.3.2 Concept of adjustment of manual input speed control gains
When there is load inertia, the actual speed gain decreases as given below.
2.3.3 Speed control gain adjustment procedure (Pr. 820, Pr. 821)
• Set "0" in Pr. 819 "easy gain tuning". (Easy gain tuning is not performed.)
Refer to the Instruction Manual (basic) for easy gain tuning.
• Refer to the following for manually input gain adjustment.
z Manual input gain adjustment
• Pr. 820 "speed control P (proportional) gain 1", Pr. 830 "speed control P (proportional) gain 2"
• Pr. 821 "speed control integral time 1", Pr. 831 "speed control integral time 2"
Make adjustment when any of such phenomena as unusual machine vibration/noise, low response level and
overshoot has occurred.
1) First check the conditions and simultaneously change Pr. 820 "speed control P gain 1" value.
2) If you cannot make proper adjustment, change Pr. 821 "speed control integral time 1" value and repeat step (1).
Actual speed gain = speed gain of motor without load ×
J
M : Inertia of motor
J
L : Motor shaft-equivalent load inertia
CAUTION
Pr. 830 "speed control P(proportional) gain 2" and Pr. 831 "speed control integral time 2" are made valid when
the RT terminal is switched on. Make adjustments in the same way as Pr. 820 and Pr. 821.
No.
Phenomenon/Condition
Adjustment Method
1 Large load inertia
Set the Pr. 820 and Pr. 821 values a little higher.
Pr. 820
When a speed rise is slow, increase the value 10% by 10% until just before
vibration/noise is produced, and set about 0.8 to 0.9 of that value.
Pr. 821
If an overshoot occurs, double the value until an overshoot does not occur, and
set about 0.8 to 0.9 of that value.
2
Vibration/noise generated
from mechanical system
Set the Pr. 820 value a little lower and the Pr. 821 value a little higher.
Pr. 820
Decrease the value 10% by 10% until just before vibration/noise is not produced,
and set about 0.8 to 0.9 of that value.
Pr. 821
If an overshoot occurs, double the value until an overshoot does not occur, and
set about 0.8 to 0.9 of that value.
3 Slow response
Set the Pr. 820 value a little higher.
Pr. 820
When a speed rise is slow, increase the value 5% by 5% until just before
vibration/noise is produced, and set about 0.8 to 0.9 of that value.
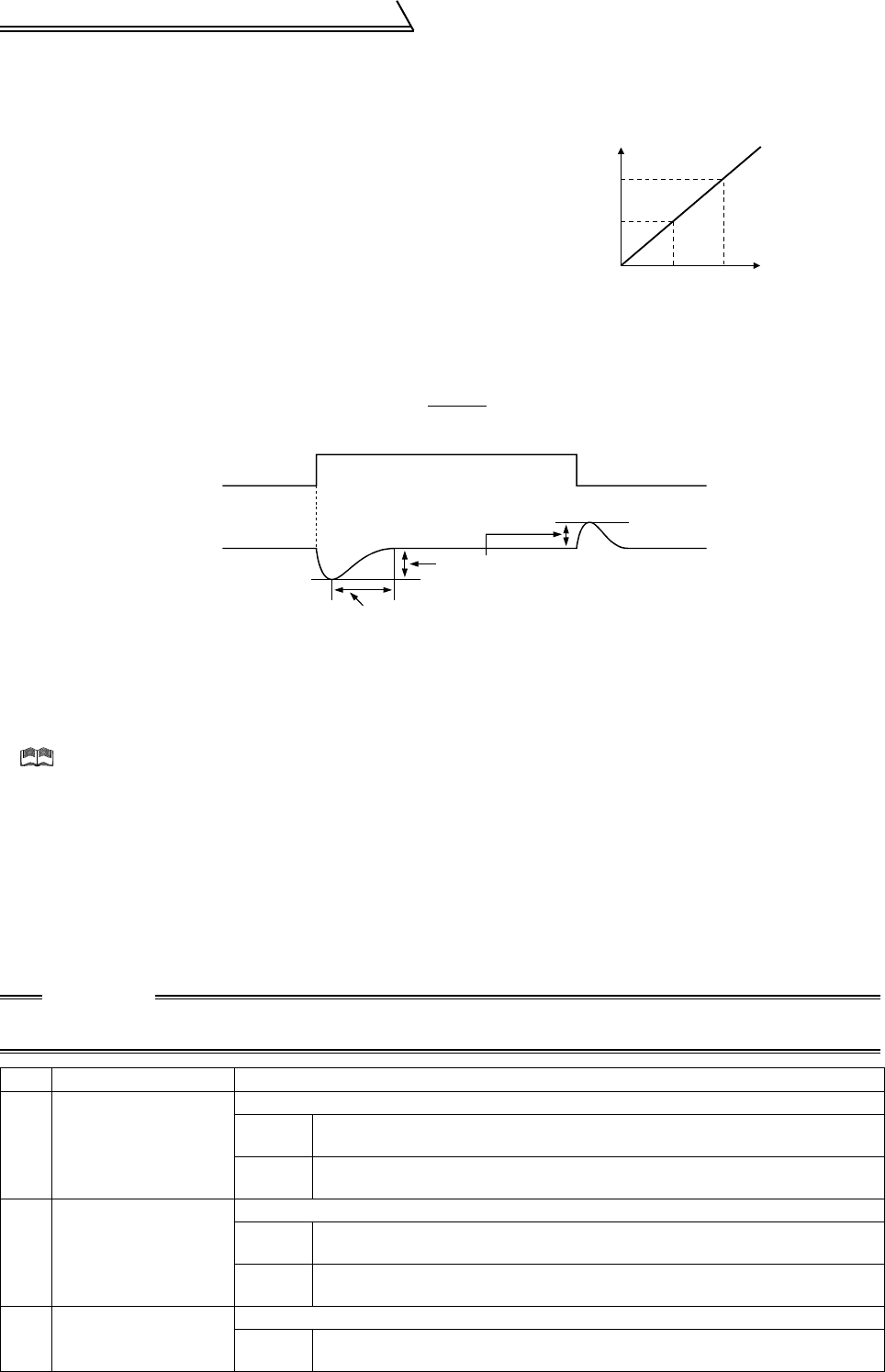
1) Speed control P gain 1
Pr. 820 = 60% is equivalent to 120rad/s (speed responce of
the motor alone). (factory setting)
Increasing the proportional gain increases the response level.
However, a too high gain will produce vibration and/or
unusual noise.
2) Speed control integral time
Pr. 821 = 0.333s (factory setting)
Decreasing the integral time shortens the return time taken at
a speed change. However, a too short time will generate an
overshoot.
Pr.820
setting
100%
(Factory setting)
Proportional gain
200rad/s
120rad/s
60%
JM+JL
JM
Decreasing the integral time shortens this return time.
Load variation
Speed
Since increasing the proportional gain increases the
response level, this speed variation decreases.