162
Orientation (Pr. 350 to Pr. 362, Pr. 393 to Pr. 399)
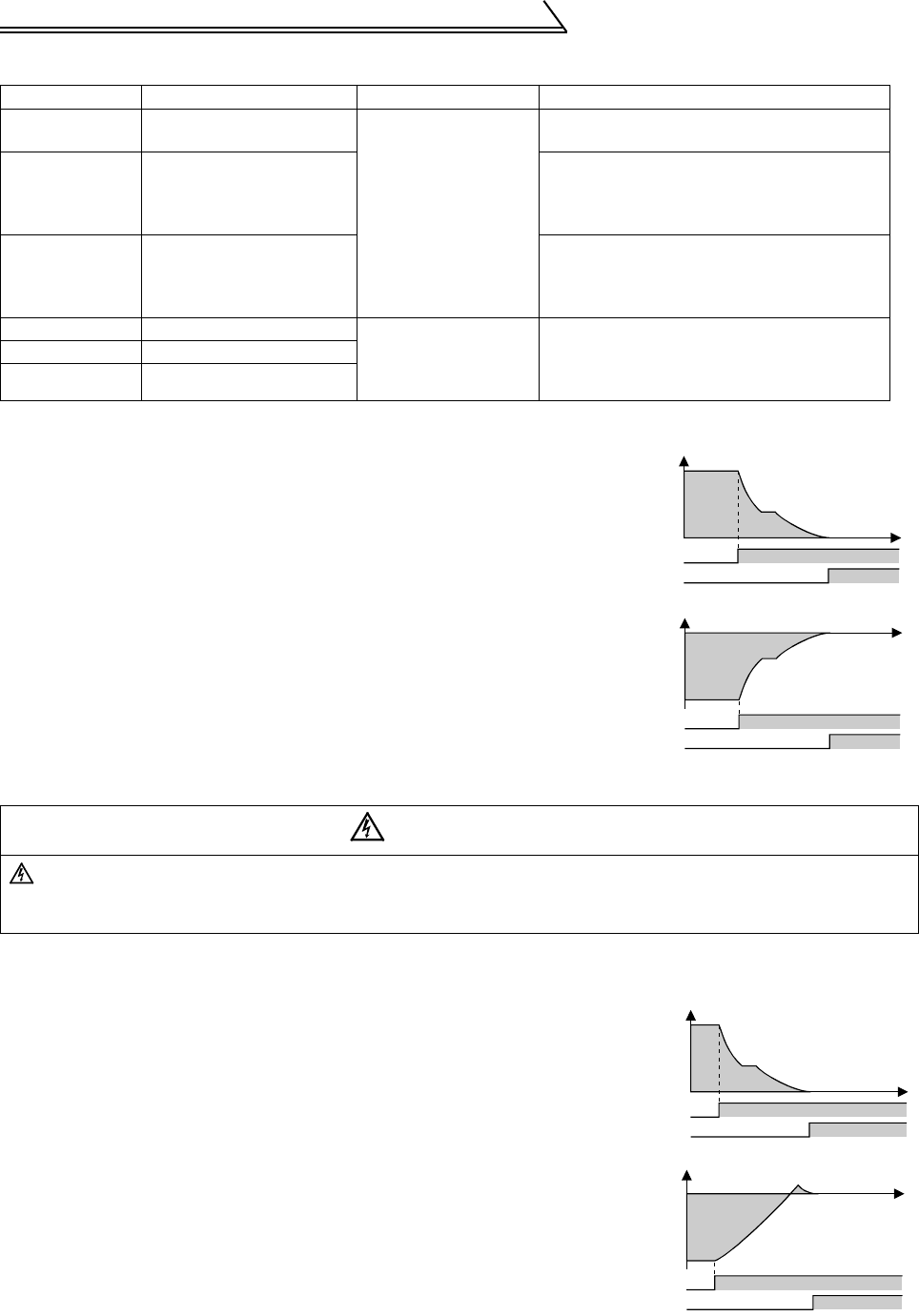
(3) Setting the rotation direction (Pr. 393 "orientation selection")
(1) Orientation from the current rotation direction
(2) Orientation from the forward rotation direction
Pr. 393 setting Rotation Direction Type Remarks
0
(factory setting)
Pre-orientation
Motor end orientation
Orientation is executed from the current
rotation direction.
1 Forward rotation orientation
Orientation is executed from the forward
rotation direction. (If the motor is running in
reverse, orientation is executed from the
forward rotation direction after deceleration.)
2 Reverse rotation orientation
Orientation is executed from the reverse
rotation direction. (If the motor is running in
forward, orientation is executed from the
reverse rotation direction after deceleration.)
10 Pre-orientation Machine end
orientation
(when the FR-V5AM or
FR-A5AP is used)
Refer to the instruction manual of the option for
details.
11 Forward rotation orientation
12 Reverse rotation orientation
• When the orientation command (terminal X22) is input, the motor speed
will decelerate from the runnig speed to Pr. 351 "orientation switchover
speed". At the same time, the orientation stop position command will be
read in. (The stop position command is determined by the settings of
Pr. 350 and Pr. 360. Refer to the diagram on the right.)
• When the orientation switchover speed is reached, the encoder Z phase
pulse will be confirmed, and the mode will change from speed control to
position control (orientation position loop gain parameter (Pr. 362)).
• When the control is changed, the distance to the orientation stop position
will be calculated. The motor will decelerate and stop with a set
deceleration pattern (Pr. 399), and the orientation (servo lock) state will
be entered.
• When entered in the Pr. 357 orientation in-position zone, the orientation
complete signal (terminal ORA) will be output.
• The zero point position (origin) can be moved using position shift (Pr.
361).
WARNING
If the orientation command (terminal X22) is turned off while the start signal is input, the motor will
accelerate toward the speed of the current speed command. Thus, to stop, turn the forward rotation
(reverse rotation) signal off.
This method is used to improve the stopping precision and maintain the
mechanical precision when the backlash is large.
If the motor is running in the forward rotation direction, it will orientation stop
with the same method as "orientation from the current rotation direction". If
the motor is running in reverse, it will decelerate, the rotation direction will be
changed to forward run, and then orientation stop will be executed.
OFF
ON
X22
Speed
(forward)
OFF
ON
ORA
[t]
OFF
ON
X22
Speed
(reverse)
OFF
ON
ORA
[t]
Speed
(forward)
X22
ORA
[t]
Speed
(reverse)
X22
ORA
[t]









































































































































































































































