



















185
Frequency setting by analog input (terminal 1, 2, 4)
4
PARAMETERS
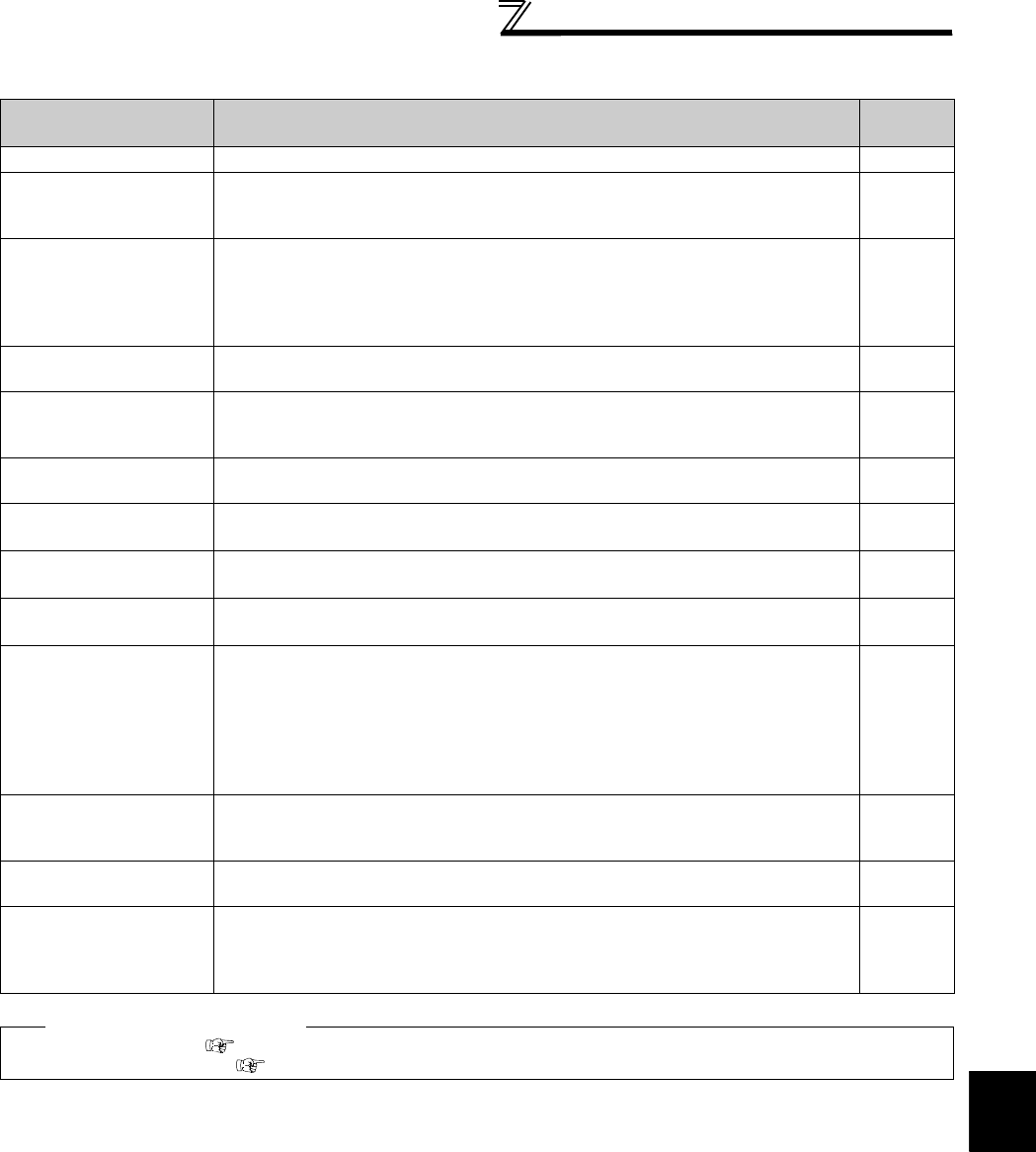
(5) Function related to 4mA input check
Function Operation
Refer to
page
Minimum frequency
Even if the input current decreases, minimum frequency setting clamp is valid. 87
Multi-speed operation
Operation by multiple speed signal has precedence even if input current decreases.
(Frequency is not retained when the input current decreases.)
Operation stops when a multi-speed signal turns OFF.
93
Jog operation
The JOG signal has precedence even during decrease in input current. (Frequency is
not retained when the input current decreases.)
Operation stops when the JOG signal is turned OFF during decrease in input current.
PU/jog operation is enabled during PID control.
At this time, PU/jog operation has precedence during decrease in input current.
95
MRS
Output is shut off by the MRS signal even if input current decreases. (The inverter
stops when the MRS signal is turned OFF.)
124
Remote setting
The retained frequency will not change even if remote acceleration/deceleration and
clear are performed during decrease in input current. Reflected at restoration.
Remote setting is invalid under PID control.
98
Retry
When retry was successful at error occurrence during decrease in input current,
retained frequency was not cleared and operation continues.
159
Added compensation,
override function
Operation of added compensation (terminal 1) and override compensation (terminal
2) are invalid during decrease in input current.
175
Input filter time
constant
The value before filtering is detected.
When input current decreases, frequency after filtering (average value) is retained.
176
Forward/reverse
rotation prevention
Motor rotation direction can be restricted independently of 4mA input check setting. 190
PID control
Although PID operation is stopped when input current decreases, the X14 signal
remains ON. (PID operation is valid.) During the pre-charge operation, the pre-
charge ending level and the pre-charge limit are not applied.
The SLEEP function overrides the operation continuation selection (Pr.573 ≠ "2 or 3").
Even if the 4mA input is lost, the SLEEP function activates. PID operation restarts at
the specified frequency when the cancellation conditions for the SLEEP function are
satisfied.
261
Power failure stop
Even if input current decreases when undervoltage or power failure occurs, the motor
stops according to the setting of power-failure deceleration stop function. E.LCI
occurs if a fault occurs from a stop.
156
Pump function
If auxiliary motor switchover conditions of pump function is satisfied even when input
current decreases, motor connection/release operation is performed.
283
Switch-over
When the switchover function is operated, frequency is the same as that of the
retained frequency.
Note that if 4mA input is invalid once in switchover mode, the frequency is not
retained next time.
195
♦ Parameters referred to ♦
Pr. 73 Analog input selection Refer to page 175
Pr. 267 Terminal 4 input selection Refer to page 171