



















4
PARAMETERS
91
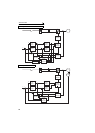
Control mode
(1) Speed control
Speed control operation is performed to zero the difference between the speed command (ω*) and actual rotation
detection value (ωFB). At this time, the motor load is found and its result is transferred to the torque current
controller as a torque current command (iq*).
(2) Torque current control
A voltage (Vq) is calculated to start a current (iq*) which is identical to the torque current command (iq) found by
the speed controller.
(3) Magnetic flux control
The magnetic flux (φ2) of the motor is derived from the excitation current (id). The excitation current command (id*)
is calculated to use that motor magnetic flux (φ2) as a predetermined magnetic flux.
(4) Excitation current control
A voltage (Vd) is calculated to start a current (id) which is identical to the excitation current command (id*) found by
magnetic flux control.
(5) Output frequency calculation
Motor slip (ωs) is calculated on the basis of the torque current value (iq) and magnetic flux (φ2). The output
frequency (w0) is found by adding that slip (ωs) to the feedback (ωFB) found by a feedback from the encoder.
The above results are used to make PWM modulation and run the motor.