



















235
Function assignment of external terminal and control
4
PARAMETERS
4.15.3
Condition selection of function validity by the second function selection signal (RT) and
third function selection signal (X9) (RT signal, X9 signal, Pr. 155)
⋅ When the RT signal turns ON, the second function becomes valid.
⋅ When the X9 signal turns ON, the third function becomes valid.
For the X9 signal, set "9" in any of Pr. 178 to Pr. 189 (input terminal function selection) to assign the function.
⋅ The second (third) function has the following applications.
(a)Switching between normal use and emergency use
(b)Switching between heavy load and light load
(c)Changing of acceleration/deceleration time by broken line acceleration/deceleration
(d)Switching of characteristic between main motor and sub motor
⋅ When the RT (X9) signal is ON, the other functions such as the second (third) are also selected.
*1 The function could be changed by switching the RT signal ON/OFF while the inverter is stopped.
If a signal is switched during the operation, the operation method changes after the inverter stops.
*2 When the RT signal is OFF, the first function is valid. When it is ON, the second function is valid.
You can select the second (third) function using the RT(X9) signal.
You can also set the condition (reflection condition) where the second function and third function become valid.
Parameter
Number
Name Initial Value Setting Range Description
155
RT signal function validity
condition selection
0
0
Second (third) function is immediately valid with ON of
the RT(X9) signal.
10
Second (third) function is valid only during the RT (X9)
signal is ON and constant speed operation. (invalid
during acceleration/deceleration)
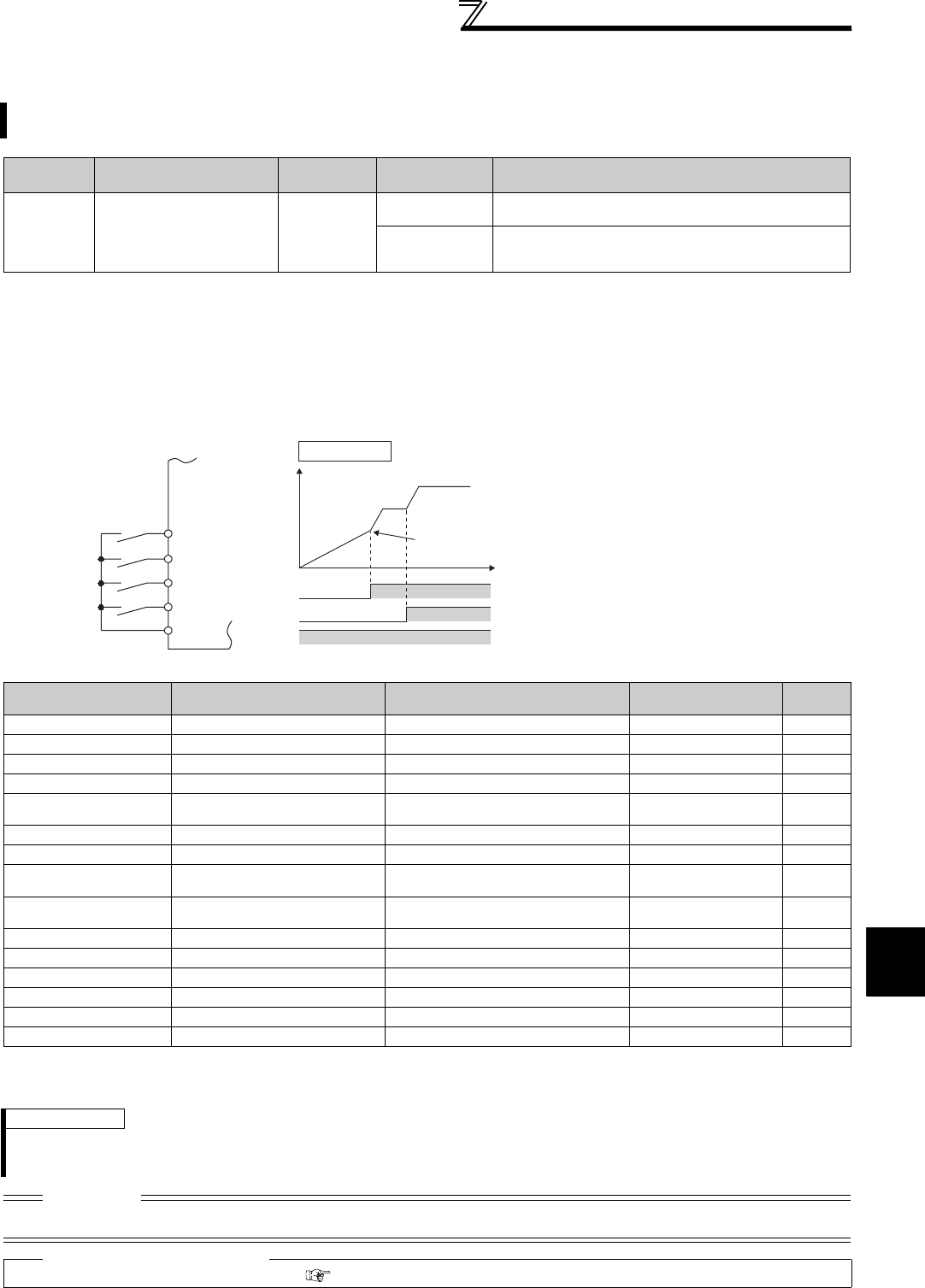
Second function
connection diagram
Second acceleration/deceleration time example
Function
First Function
Parameter Number
Second Function
Parameter Number
Third Function
Parameter Number
Refer to
Page
Torque boost Pr. 0 Pr. 46 Pr. 112 146
Base frequency Pr. 3 Pr. 47 Pr. 113 159
Acceleration time Pr. 7 Pr. 44 Pr. 110 172
Deceleration time Pr. 8 Pr. 44, Pr. 45 Pr. 110, Pr. 111 172
Electronic thermal relay
function
*1
Pr. 9 Pr. 51 *2 183
Stall prevention Pr. 22 Pr. 48, Pr. 49 Pr. 114, Pr. 115 152
Applied motor
*1 Pr. 71 Pr. 450 *2 187
Motor constant
*1
Pr. 80 to Pr. 84, Pr. 89,
Pr. 90 to Pr. 94, Pr. 96, Pr. 859
Pr. 453 to Pr. 457, Pr. 569,
Pr. 458 to Pr. 462, Pr. 463, Pr. 860
*2 189
Online auto tuning
selection
*1
Pr. 95 Pr. 574 *2 199
Motor control method
*1 Pr. 800 Pr. 451 *2 92
Speed control gain Pr. 820, Pr. 821 Pr. 830, Pr. 831
*2 105
Analog input filter Pr. 822, Pr. 826 Pr. 832, Pr. 836
*2 292
Speed detection filter Pr. 823 Pr. 833
*2 144
Torque control gain Pr. 824, Pr. 825 Pr. 834, Pr. 835
*2 130
Torque detection filter Pr. 827 Pr. 837
*2 144
REMARKS
⋅ The RT signal is assigned to the RT terminal in the initial setting. By setting "3" in any of Pr. 178 to Pr. 189 (input terminal function
selection), the RT signal can be assigned to the other terminal.
⋅ When both the RT and X9 signals are ON, the X9 signal (third function) is prioritized.
CAUTION
⋅ Changing the terminal assignment using Pr. 178 to Pr. 189 (input terminal function selection) may affect the other functions. Set
parameters after confirming the function of each terminal.
♦ Parameters referred to ♦
Pr. 178 to Pr.189 (input terminal function selection) Refer to page 231
STF/STR
Inverter
Start
Second
function
selection
RT
High speed
RH
Middle speed
RM
SD
(initial value)
RT
Output frequency
Setting value "0"
RH
RM
Acceleration
time is reflected
Time