



















13/24 BCN-C22005-634
1.5 Position control under PM sensorless vector control (Pr.800)
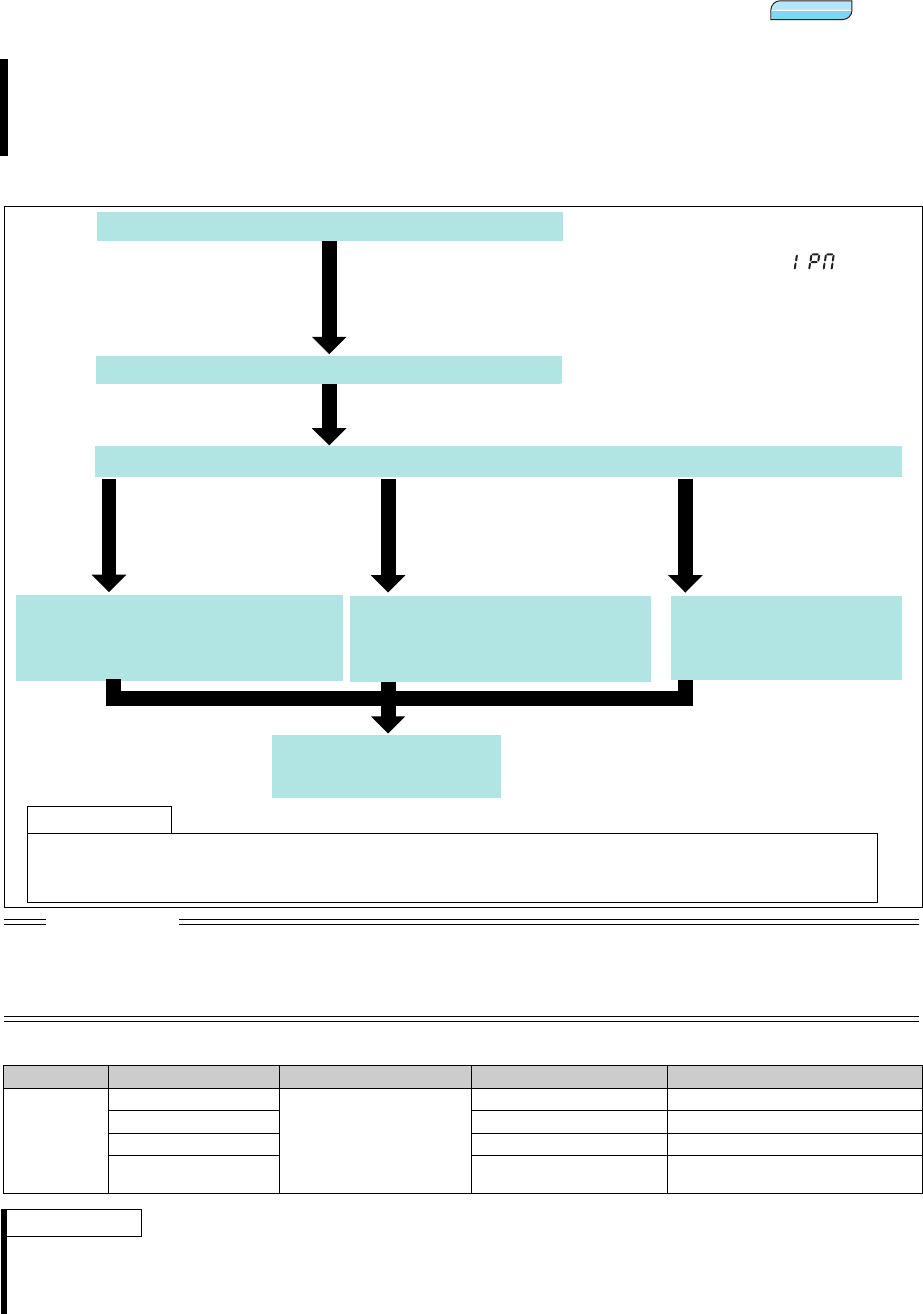
(1) Setting procedure
(2) Select the control method
Refer to Chapter 4 of the Instruction Manual (Applied) for the detail of the position control.
In position control, speed commands, which are calculated to eliminate the difference between the
command pulse (parameter setting) and the estimated feedback pulse, are output to rotate the motor.
This inverter can perform simple position feed by contact input, position control by inverter simple pulse
input, and position control by FR-A7AL pulse train input.
CAUTION
The carrier frequency is limited during PM sensorless vector control. (Refer to page 16.)
Position deviation may occur due to motor temperature changes. In such case, shut off the inverter outputs, and restart.
The Z-phase outputs cannot be made under PM sensorless vector control. When Pr.419 = "1" is set to send positioning
commands in pulses via a programmable controller positioning module and FR-A7AL, use the home position return
operation that does not require Z-phase signals.
Pr.998 Pr.998 Setting Control Method Control Type Remarks
3003, 3103
(MM-CF)
Other than 9, 13, 14
PM sensorless vector
control
Speed control
9 Test operation
13 Position control
14
Speed control/position
control switchover
MC signal ON: position control
MC signal OFF: speed control
REMARKS
Perform position control under PM sensorless vector control only when using an MM-CF IPM motor. Moreover, perform it only
when the high frequency superposition control is selected. (Pr.788 = "9999 (initial value)")
Position control is performed on the assumption of 4096 pulses/motor rotation.
The positioning accuracy is 200 pulses/rev for 1.5K or lower, and 100 pulses/rev for 2K or higher (under no load).
PMPMPM
Test run
Selection of position command source. (Pr. 419)
Select the control mode. (Pr.800)
As required
· Set the electronic gear. (Refer to Chapter 4 of the Instruction Manual (Applied))
· Setting of positioning adjustment parameter (Refer to Chapter 4 of the Instruction Manual (Applied))
· Gain adjustment of position control (Refer to Chapter 4 of the Instruction Manual (Applied))
Set
Pr.800
= "13" (position control) or "14" (speed/position switchover) to
enable position control.
Set by IPM parameter initialization (Refer to page 4.)
Setting of parameter for position feed
(Pr. 465 to Pr. 494).
(Refer to Chapter 4 of the Instruction
Manual (Applied).)
Selection of command pulse
form (Pr. 428).
(Refer to Chapter 4 of the
Instruction Manual (Applied).
)
Position command by contact
input
Set "0" (initial value) in
Pr. 419
.
Position command by inverter
pulse train input
Set "2" in
Pr. 419
.
Refer to the Instruction
Manual of FR-A7AL.
Position command from the
positioning module of the
programmable controller
system (through FR-A7AL)
Set
Pr. 419
= "1"
Set
Pr.998 IPM parameter initialization
= "3003 or 3103" or (IPM
parameter initialization) to "3003"
"3003": Parameter (rotations per minute) settings for MM-CF IPM motor
"3103": Parameter (frequency) settings for MM-CF IPM motor
bcnc22005634.fm 13 ページ 2012年7月3日 火曜日 午前9時43分