



















96
Speed control by Real sensorless vector
control, vector control
4.4 Speed control by Real sensorless vector control, vector
control
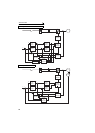
(1) Control block diagram
Purpose Parameter that should be Set Refer to Page
To perform torque limit during speed control Torque limit
Pr. 22, Pr. 803, Pr. 810,
Pr. 812 to Pr. 817,
Pr. 858, Pr. 868, Pr. 874
100
Gain adjustment of speed control
Easy gain tuning
Gain adjustment
Pr. 818 to Pr. 821, Pr. 830,
Pr. 831, Pr. 880
105
To enhance the trackability of the motor in
response to a speed command change
Speed feed forward control,
model adaptive speed control
Pr. 828, Pr. 877 to Pr. 881
112
Stabilize the speed detection signal Speed detection filter Pr. 823, Pr. 833 144
Accelerates the rise of the torque at a start Torque bias Pr. 840 to Pr. 848
114
Avoid mechanical resonance Notch filter Pr. 862, Pr. 863
118
Speed control is exercised to match the speed command and actual motor speed.
Terminal 2
Terminal 4
[Pr. 858 = 0]
Terminal 1
[Pr. 868 = 0]
RL
RM
RH
REX
Option
Operation panel
Multi-speed
selection
[Pr. 4 to 6,
24 to 27,
232 to 239]
Speed setting
filter
RT
RT
[Pr. 822]
[Pr. 832]
AU
AU
Terminal 2 bias [C2, C3 (Pr. 902)]
Terminal 2 gain [Pr. 125, C4 (Pr. 903)]
Terminal 4 bias [C5, C6 (Pr. 904)]
Terminal 4 gain [Pr. 126, C7 (Pr. 905)]
Analog input offset
adjustment [Pr. 849]
Analog
input
selection
[Pr. 73]
Operation Mode
[Pr. 79]
Servo lock
zero speed control
Zero speed control
DC injection brake operation
Maximum/minimum setting
[Pr. 1]
[Pr. 2]
[Pr. 13]
Acceleration/deceleration processing
[Pr. 10]
Vector control
[Pr. 800 = 0]
Real sensorless
Vector control
[Pr. 800 = 10]
[Pr. 802 = 1]
[Pr. 802 = 0]
[Pr. 850 = 1]
[Pr. 850 = 0]
LX
[Pr. 7]
[Pr
. 8]
A
[Pr. 74]
[Pr. 74]
[Pr. 832 = 9999]
[Pr. 832 = 9999]
[Pr. 822 = 9999]
[Pr. 822 = 9999]
Running
During stop
Decelerates to stop
[Pr. 11]
Zero speed control
LX
LX
Decelerates to stop
[Pr. 11]