362
Special operation and frequency control
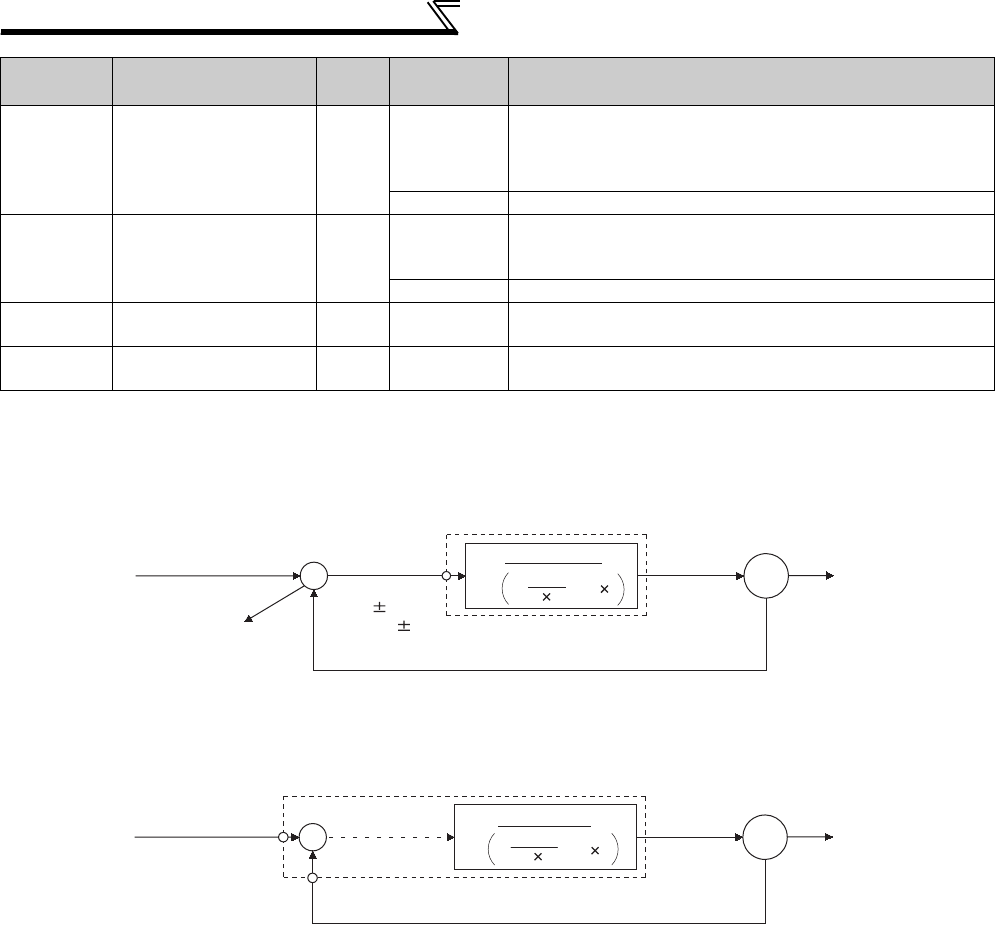
(1) PID control basic configuration
⋅ Pr. 128 = "10, 11" (Deviation value signal input)
*Set 0 in Pr. 868 Terminal 1 function assignment. PID control is invalid when Pr. 868 ≠ 0.
⋅ Pr. 128 = "20, 21" (Measured value input)
*1 Note that terminal 1 input is added to the set point of terminal 2 input.
*2 Set 0 in Pr. 858 Terminal 4 function assignment. PID control is invalid when Pr. 858 ≠ 0
134 *1 PID differential time 9999
0.01 to
10.00s
For deviation lamp input, time (Td) required for providing only
the manipulated variable for the proportional (P) action. As the
differential time increases, greater response is made to a
deviation change.
9999 No differential control
575
Output interruption
detection time
1s
0 to 3600s
The inverter stops operation if the output frequency after PID
operation remains at less than the Pr. 576 setting for longer
than the time set in Pr. 575.
9999 Without output interruption function
576
Output interruption
detection level
0Hz 0 to 400Hz
Set the frequency at which the output interruption processing
is performed.
577
Output interruption
cancel level
1000% 900 to 1100%
Set the level (Pr. 577 minus 1000%) at which the PID output
interruption function is canceled.
*1 Pr. 129, Pr. 130, Pr. 133 and Pr. 134 can be set during operation. They can also be set independently of the operation mode.
Parameter
Number
Name
Initial
Value
Setting
Range
Description
+
-
M
Deviation signal
Feedback signal (measured value)
Ti S
1
1+
+Td S
Kp
PID operation
To outside
Set point
Inverter circuit
Motor
Terminal 1
0 to 10VDC
(0 to 5V)
Kp: Proportionality constant Ti: Integral time S: Operator Td: Differential time
Manipulated
variable
*
+
-
M
Ti S
Kp 1+ +Td S
1
PID operation
Pr. 133 or
terminal 2
Set point
Inverter circuit
Motor
Feedback signal (measured value)
Terminal 4
Kp: Proportionality constant Ti: Integral time S: Operator Td: Differential time
Manipulated
variable
0 to 5VDC
(0 to 10V, 4 to 20mA)
4 to 20mADC (0 to 5V, 0 to 10V)
*1
*2












































































































































































































































































































































































































































































































































