



















136
Position control by vector control
(1) Setting of position feed amount by parameter
⋅Set position feed amount in Pr. 465 to Pr. 494 .
⋅The feed amount set in each parameter is selected by multi-speed terminal (RH, RM, RL, REX).
⋅Set (encoder resolution × speed × 4 times) for position feed amount.
⋅For example, the formula for stopping the motor after 100 rotations using the SF-V5RU is as follows:
2048 (pulse/rev) × 100 (speed) × 4 = 819200 (feed amount)
To set 819200 for the first position feed amount, divide the value into upper four digits and lower four digits and set
81 (decimal) in Pr. 466 (upper) and 9200 (decimal) in Pr. 465 (lower).
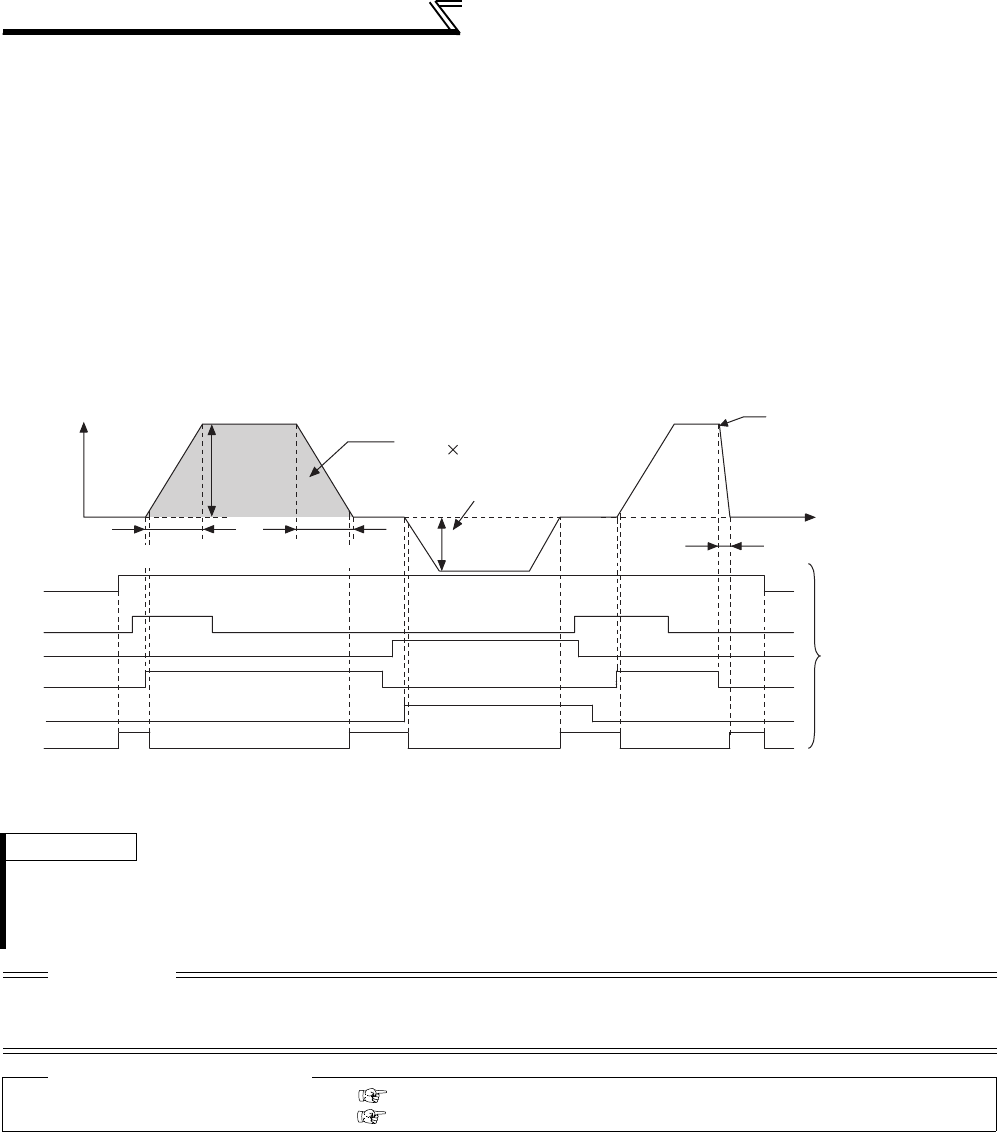
(2) Position command operation by parameter
⋅ For deceleration by turning the STF(STR) OFF, use Pr. 464 Digital position control sudden stop deceleration time to set
deceleration time.
REMARKS
⋅ Acceleration/deceleration time is 0.1s minimum and 360s maximum.
⋅ Pr. 20 Acceleration/deceleration reference frequency is clamped at a minimum of 16.66Hz (500r/min).
⋅ The acceleration/deceleration patterns for position control are all linear acceleration and the setting of Pr. 29 Acceleration/
deceleration pattern selection is invalid.
CAUTION
Information on multi-speed command (position command by RL, RM, RH, and REX signals) is determined at rising of the forward
(reverse) command to perform position control. Therefore, set forward (reverse) command after multi-speed command (position
command). Position feed is invalid if the multi-speed command is given after forward (reverse) command.
♦Parameters referred to♦
Pr. 20 Acceleration/deceleration reference frequency Refer to page 172
Pr. 29
Acceleration/deceleration pattern selection Refer to page 176
Servo on (LX)
RH
STF
STR
RM
Feed speed
Pr. 4
First position feed amount
Pr. 5
Y
36
In-position
Pr. 464
Stops when the STF is
turned off
Shaded part is the travel
Pr. 7
(Pr. 44, Pr. 110)
Pr. 8
(Pr. 45, Pr. 111)
Frequency (Hz)
Second position
feed amount
Time
Position feed is
performed by sending
run command by
contact input or
communication.
Pr. 466 10000 + Pr. 465