276
Operation setting at fault occurrence
4.18.3 Input/output phase loss protection selection (Pr. 251, Pr. 872)
(1) Output phase loss protection selection (Pr. 251)
⋅ When Pr. 251 is set to "0", output phase loss protection (E.LF) becomes invalid.
(2) Input phase loss protection selection (Pr. 872)
⋅ When Pr. 872 is set to "1", input phase loss protection (E.ILF) is provided if a phase loss of one phase among the
three phases is detected for 1s continuously.
4.18.4 Overspeed detection (Pr. 374)
4.18.5 Encoder signal loss detection (Pr. 376)
* Setting can be made only when the FR-A7AP/FR-A7AL (option) is mounted.
You can disable the output phase loss protection function that trips the inverter if one phase of the inverter output
side (load side) three phases (U, V, W) is lost.
The input phase loss protection function of the inverter input side (R/L1, S/L2, T/L3) can be valid.
Parameter
Number
Name Initial Value Setting Range Description
251
Output phase loss protection
selection
1
0 Without output phase loss protection
1 With output phase loss protection
872
Input phase loss protection
selection
0
0 Without input phase loss protection
1 With input phase loss protection
REMARKS
If an input phase loss has occurred when Pr. 872 = "1" (input phase loss protected) and a value other than "0" (power failure stop
function valid) is set in Pr. 261, input phase loss protection (E.ILF) is not provided but power-failure deceleration is made.
CAUTION
⋅ When an input phase loss occurs in the R/L1 and S/L2 phases, input phase loss protection is not provided but the inverter
output is shut off.
⋅ If an input phase loss continues for a long time, the converter section and capacitor lives of the inverter will be shorter.
♦ Parameters referred to ♦
Pr. 261 Power failure stop selection Refer to page 270
Parameter
Number
Name Initial Value Setting Range Description
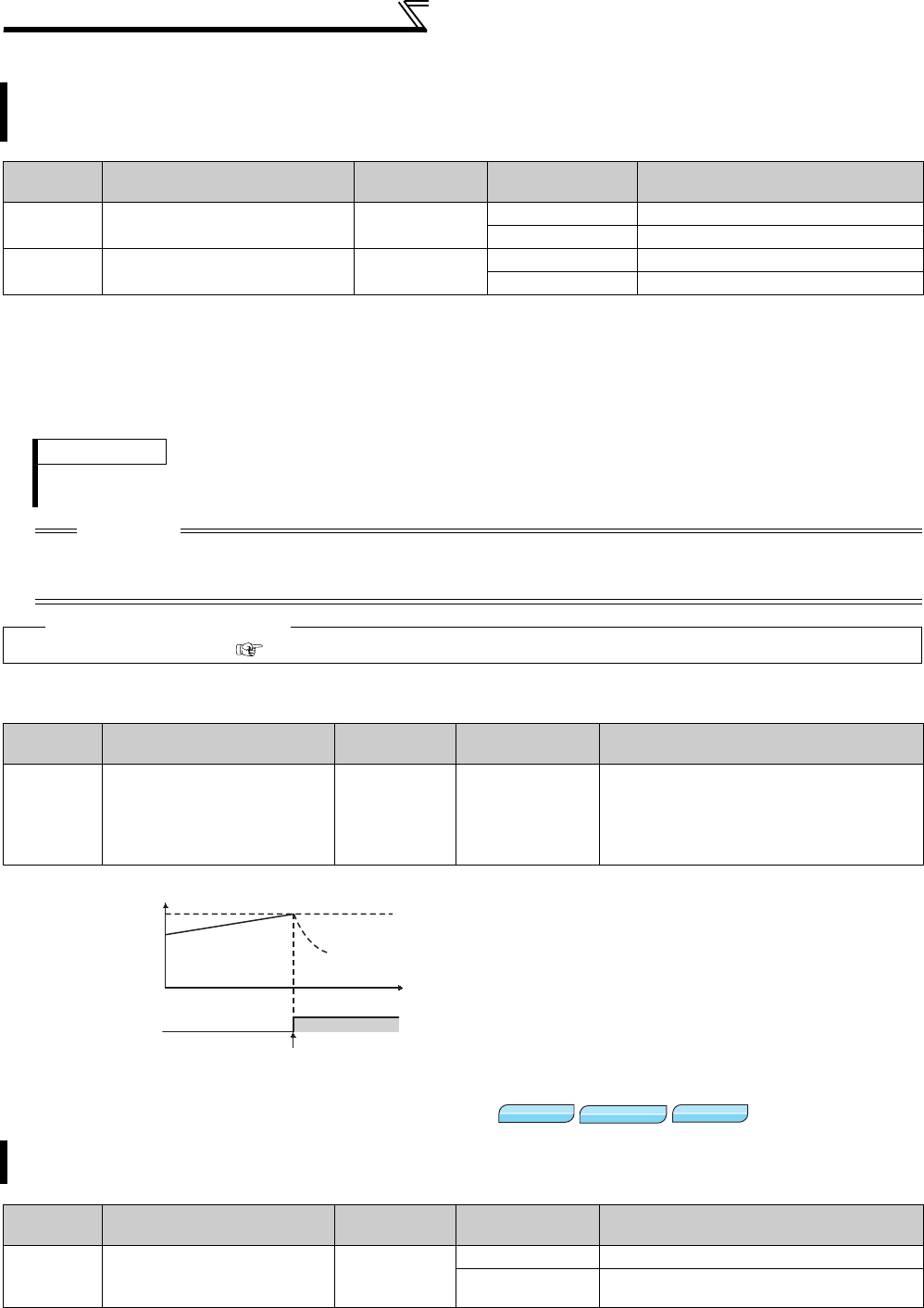
374 Overspeed detection level 140Hz 0 to 400Hz
When the motor speed reaches or exceeds
the speed set in Pr. 374 during encoder
feedback control, Real sensorless vector
control, or vector control, over speed (E.OS)
occurs and the inverter trips.
When the encoder signal is lost during encoder feedback control, orientation control, or vector control, signal loss
detection (E.ECT) is activated to trip the inverter.
Parameter
Number
Name Initial Value Setting Range Description
376
Encoder signal loss
detection enable/disable
selection
0
0
Signal loss detection is invalid
1
Signal loss detection is valid
ALM
Motor speed *
Time
E.OS
Coast to stop
ON
r. 374
* The output frequency and Pr. 374 are compared during
Real sensorless vector control.
V/F
V/F
Magnetic flux
Magnetic flux
Vector
Vector












































































































































































































































































































































































































































































































































