



















119
Torque control by Real sensorless
vector control, vector control
4
PARAMETERS
4.5 Torque control by Real sensorless vector control, vector
control
4.5.1 Torque control
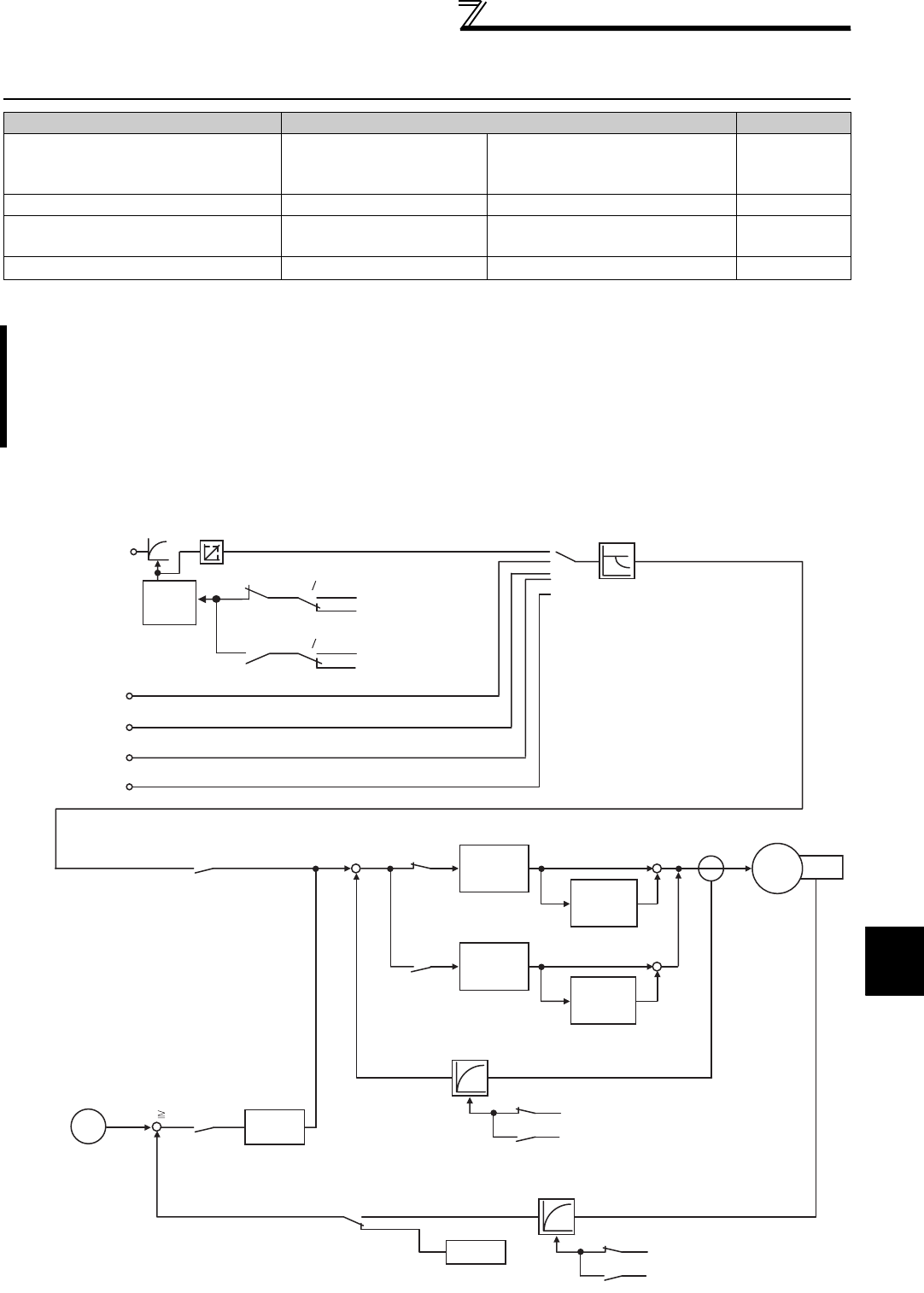
(1) Block diagram
Purpose Parameter that must be Set Refer to Page
Selection of torque command
source and setting of torque
command value
Torque command Pr. 803 to Pr. 806
125
Prevent the motor overspeed Speed limit Pr. 807 to Pr. 809
127
Improve torque control accuracy
Gain adjustment for
torque control
Pr. 824, Pr. 825, Pr. 834, Pr. 835
130
Stabilize the torque detection signal Torque detection filter Pr. 827, Pr. 837 144
Torque control is exercised to develop torque as set in the torque command.
The motor speed becomes constant when the motor output torque and load torque are balanced.
For torque control, therefore, the speed is determined by the load.
For torque control, the motor gains speed as the motor output torque becomes greater than the motor load.
To prevent overspeed, set the speed limit value so that the motor speed does not increase too high.
(Torque control is disabled under speed limit since speed control is exercised.)
When speed limit is not set, the speed limit value setting is regarded as 0Hz to disable torque control.
[Pr. 824]
RT
RT
RT
RT
-
RT
RT
Speed detection filter
Vector control
Motor
Encoder
[Pr. 800 = 1]
+
+
+
+
+
Actual speed or estimated speed
< Speed limit value
Actual speed or estimated speed
Speed limit value
-
+
A
Speed
limit
value
Torque control
P gain 1
Torque control
integral time 1
Torque control
integral time 2
[Pr. 834]
[Pr. 827]
[Pr. 837]
[Pr. 823]
[Pr. 833]
Torque control
P gain 2
[Pr. 825]
[Pr. 835]
Torque detection filter
Real sensorless
vector control
Speed
estimation
Speed control
(proportional
control)
[Pr. 800 = 11]
Terminal 1
CC-Link
(FR-A7NC/FR-A7NCE)
16bit digital input
Torque command
source selection
Constant power range
torque characteristic selection
RT
RT
[Pr. 826]
[Pr. 74]
[Pr. 826 = 9999]
[Pr. 826 = 9999]
[Pr. 836]
[Pr. 74]
[Pr. 836 = 9999]
[Pr. 836 = 9999]
Terminal 1 bias [C16,C17 (Pr. 919)]
Terminal 1 gain [C18,C19 (Pr. 920)]
Parameter
[Pr. 805, Pr. 806]
[Pr. 868 = 3, 4]
(FR-A7AX)
[Pr. 804]
[Pr. 803]
Torque
setting
filter
Pulse train
(FR-A7AL)