



















131
Torque control by Real sensorless vector
control, vector control
4
PARAMETERS
(4) Adjustment procedure
Make adjustment when any of such phenomena as unusual motor and machine vibration/noise/current and
overcurrent has occurred.
1)Check the conditions and simultaneously change the Pr. 824 value.
2)If you cannot make proper adjustment, change the Pr. 825 value and repeat step 1).
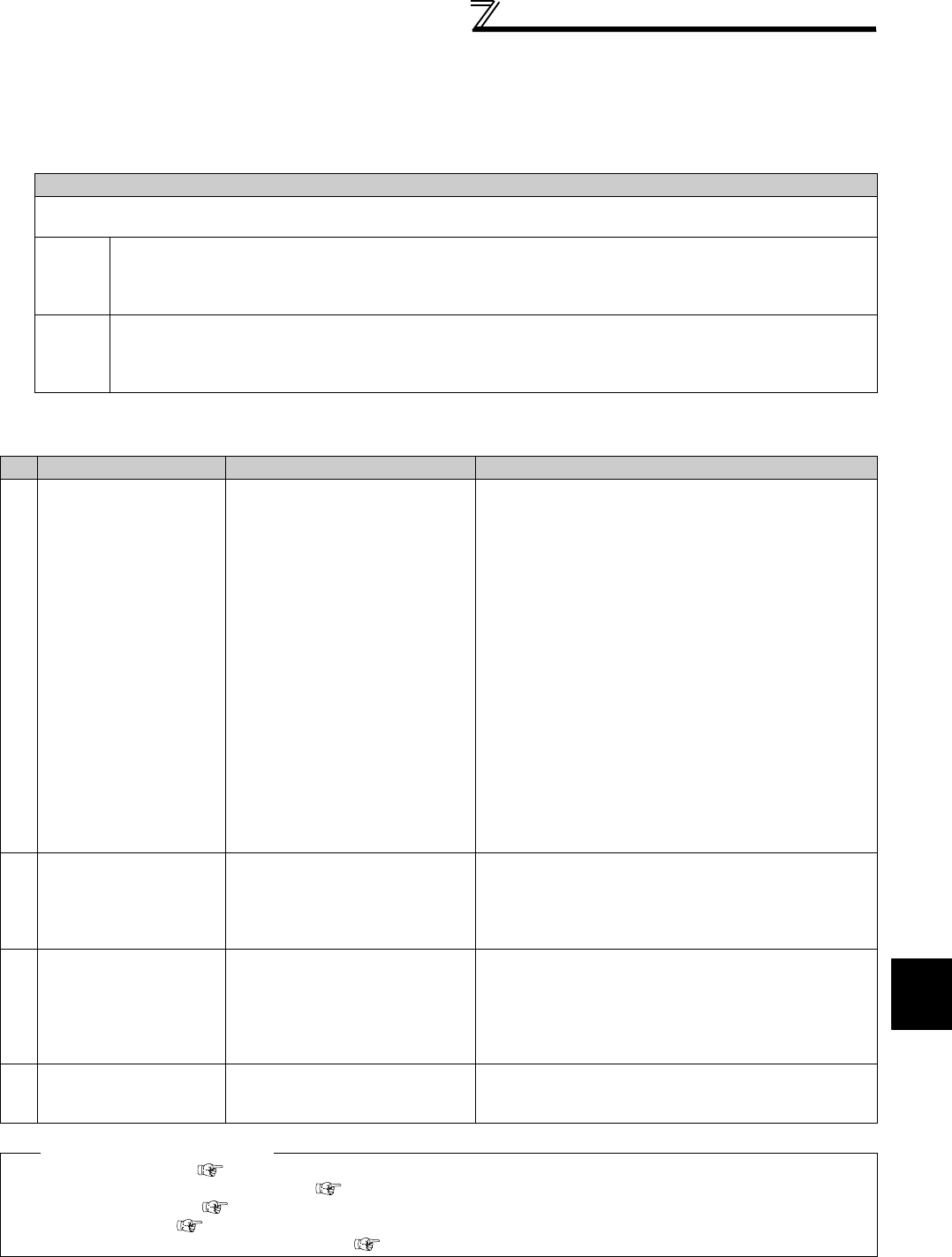
(5) Troubleshooting (Torque)
Adjustment Method
Set Pr. 824 a little lower and Pr. 825 a little higher. First lower Pr. 824 and check the motor for unusual vibration/noise and
overcurrent. If the problem still persists, increase Pr. 825 .
Pr. 824
Decrease the value 10% by 10% until just before unusual noise and current are improved, and set about 0.8 to 0.9
of that value.
Note that a too low value will produce current ripples, causing the motor to generate sound synchronizing the cycle
of current ripples.
Pr. 825
Increase the current value double by double until just before an unusual noise and current does not occur, and set
about 0.8 to 0.9 of that value.
Note that taking a too long time will produce current ripples, causing the motor to generate sound synchronizing
the cycle of current ripples.
Phenomenon Cause Countermeasures
1
Torque control is not
exercised normally.
(1) The phase sequence of the
motor or encoder wiring is
wrong.
(1) Check the wiring. (Refer to page 14)
(2) The Pr. 800 Control method
selection setting is improper.
(2) Check the Pr. 800 setting. (Refer to page 92)
(3) The speed limit value is not
input.
(3) Set the speed limit value. (If the speed limit value is not
input, the motor will not rotate since the speed limit
value is regarded as 0Hz.)
(4) The torque command varies. (4)-1 Check that the command device gives a correct
torque command.
(4)-2 Decrease Pr. 72 PWM frequency selection .
(4)-3 Increase Pr. 826 Torque setting filter 1
(5) The torque command does not
match the inverter-recognized
value.
(5) Recalibrate C16 Terminal 1 bias command (torque/
magnetic flux), C17 Terminal 1 bias (torque/magnetic flux),
C18 Terminal 1 gain command (torque/magnetic flux), C19
Terminal 1 gain (torque/magnetic flux). (Refer to page 300)
(6) Torque variation due to the
change in the motor
temperature.
(6) Select magnetic flux observer by setting Pr. 95 Online
auto tuning selection. (Refer to page 199)
2
When the torque
command is small, the
motor rotates in the
direction opposite to the
start signal.
The offset calibration of the torque
command does not match.
Recalibrate C16 Terminal 1 bias command (torque/magnetic
flux) and C17 Terminal 1 bias (torque/magnetic flux). (Refer to
page 300)
3
Normal torque control
cannot be exercised
during acceleration/
deceleration.
The motor vibrates.
The speed limit is activated.
(When Pr. 807 = "0, 2", the speed
limit may be activated since the
speed limit value changes with the
setting of the acceleration/
deceleration time in Pr. 7 and Pr. 8. )
Reduce the acceleration/deceleration time.
Or, set the acceleration/deceleration time to "0". (The
speed limit during acceleration/deceleration depends on
the speed limit during the constant speed.)
4
Output torque is not linear
in response to the torque
command.
Insufficient torque. Return the excitation ratio in Pr. 854 to the initial value.
♦Parameters referred to♦
Pr. 72 PWM frequency selection Refer to page 284
Pr. 178 to Pr. 189 (input terminal function selection) Refer to page 231
Pr. 800 Control method selection
Refer to page 92
Pr. 807 Speed limit selection Refer to page 127
C16 to C19 (torque setting voltage (current) bias and gain)
Refer to page 300