


















94
Control mode
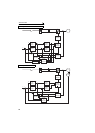
(5) Switching the control method from the external terminal (MC signal)
⋅ When "12 (2)" is set in Pr. 800 (Pr. 451 ), speed control is selected when the control mode switching signal (MC) is
OFF, and torque control is selected when the signal is OFF under Real sensorless vector control and vector
control. Switching between speed control and torque control is always enabled.
Under vector control, speed control/position control switchover and torque control/position control switchover can be
made by setting "4, 5" in
Pr. 800
. For the terminal used for MC signal input, set "26" in any of
Pr. 178 to Pr. 189 (input
terminal function selection)
to assign the function.
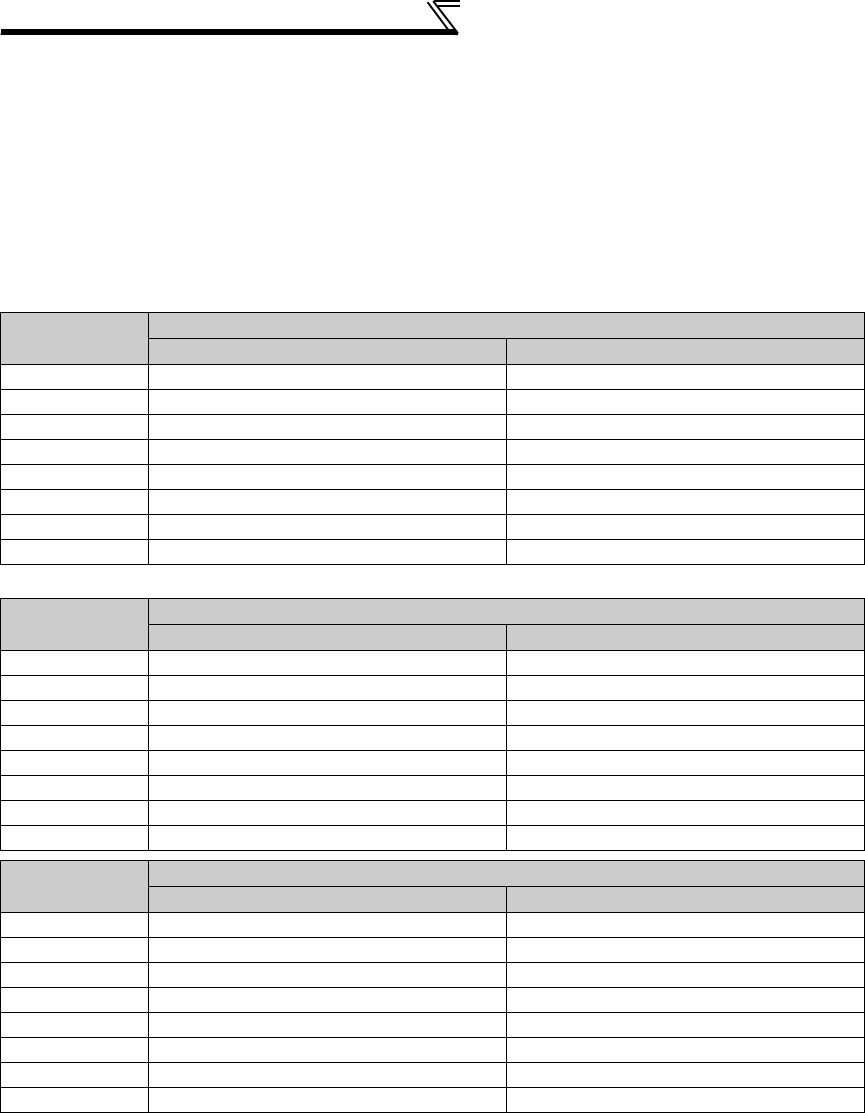
⋅ When an analog input terminal (terminal 1,4) is used for torque limit, torque command, etc., terminal functions also
switch as below if control mode is switched.
Terminal 1 function according to control
* This setting is valid under vector control.
Pr. 868 Setting
Real Sensorless Vector Control (Pr. 800 = 12), Vector Control (Pr. 800 = 2)
Speed control (MC signal-OFF) Torque control (MC signal-ON)
0 (initial value) Speed setting auxiliary Speed limit auxiliary
1 Magnetic flux command * Magnetic flux command *
2 Regenerative torque limit (Pr. 810 = 1) ⎯
3 ⎯ Torque command (Pr. 804 = 0)
4 Torque limit (Pr. 810 = 1) Torque command (Pr. 804 = 0)
5 ⎯ Forward reverse speed limit (Pr. 807 = 2)
6 ⎯⎯
9999 ⎯⎯
Pr. 868 Setting
Vector Control (Pr. 800 = 4)
Speed control (MC signal-OFF) Position control (MC signal-ON)
0 (initial value) Speed setting auxiliary ⎯
1 Magnetic flux command Magnetic flux command
2 Regenerative torque limit (Pr. 810 = 1) Regenerative torque limit (Pr. 810 = 1)
3 ⎯⎯
4 Torque limit (Pr. 810 = 1) Torque limit (Pr. 810 = 1)
5 ⎯⎯
6 Torque bias ⎯
9999 ⎯⎯
Pr. 868 Setting
Vector Control (Pr. 800 = 5)
Position control (MC signal-OFF) Torque control (MC signal-ON)
0 (initial value) ⎯ Speed setting auxiliary
1 Magnetic flux command Magnetic flux command
2 Regenerative torque limit (Pr. 810 = 1) ⎯
3 ⎯ Torque command (Pr. 804 = 0)
4 Torque limit (Pr. 810 = 1) Torque command (Pr. 804 = 0)
5 ⎯ Forward reverse speed limit (Pr. 807 = 2)
6 ⎯⎯
9999 ⎯⎯