


















98
Speed control by Real sensorless vector
control, vector control
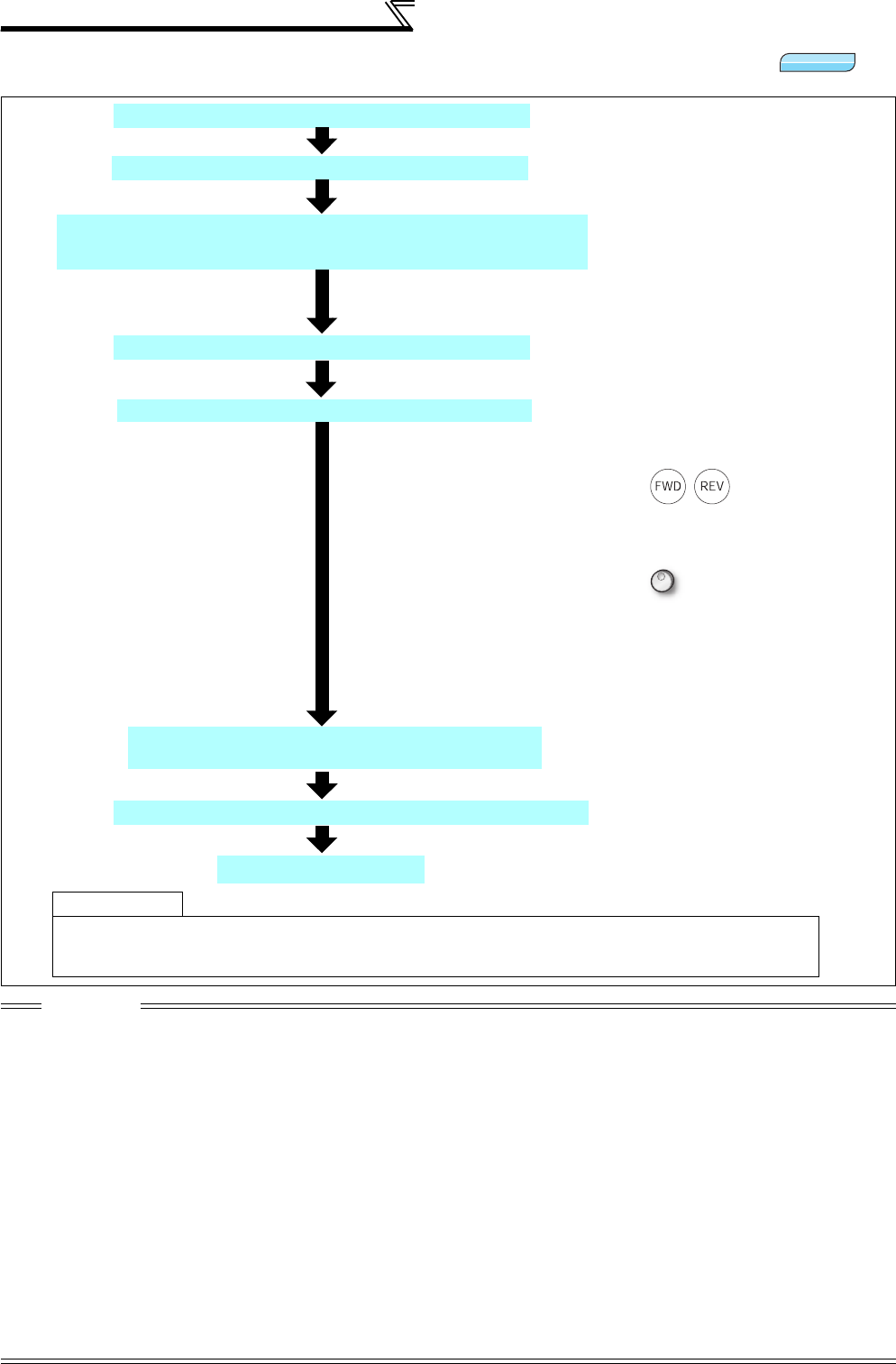
4.4.1 Setting procedure of Real sensorless vector control (speed control)
CAUTION
⋅ Make sure to perform offline auto tuning before performing Real sensorless vector control.
⋅ Speed command setting range is 0 to 120Hz for Real sensorless vector control.
⋅ The carrier frequencies are selectable from among 2k, 6k, 10k, 14kHz for Real sensorless vector control.
⋅ Torque control cannot be performed in the low speed (approx. 10Hz or less) regeneration range and with light load at low speed
(approx. 20% or less of rated torque at approx. 5Hz or less). Choose vector control.
⋅ Performing pre-excitation (LX signal and X13 signal) under torque control may start the motor running at a low speed even when
the start command (STF or STR) is not input. The motor may run also at a low speed when the speed limit value = 0 with a start
command input. Perform pre-excitation after making sure that there will be no problem in safety if the motor runs.
⋅ Do not switch between the STF (forward rotation command) and STR (reverse rotation command) during operation under torque
control. Overcurrent trip (E.OC) or opposite rotation deceleration fault (E.11) occurs.
⋅ For the 0.4K to 3.7K, the speed deviation may become large at 20Hz or less and torque may become insufficient in the low speed
range under 1Hz during continuous operation under Real sensorless vector control. In this case, stop the inverter once, then start
again to improve.
⋅ When the inverter is likely to start during motor coasting under Real sensorless vector control, set to make frequency search of
automatic restart after instantaneous power failure valid (Pr. 57 ≠ "9999", Pr. 162 = "10").
⋅ Enough torque may not be generated in the ultra-low speed range less than approx. 2Hz when performing Real sensorless
vector control.
The guideline of speed control range is as shown below.
Driving: 1:200(2, 4, 6 poles) Can be used at 0.3Hz or more at rated 60Hz
1:30 (8, 10 poles) Can be used at 2Hz or more at rated 60Hz
Regeneration:1:12 (2 to 10 poles) Can be used at 5Hz or more at rated 60Hz
Sensorless
Sensorless
Sensorless
Set the torque limit. (Pr. 810)
(Refer to page 100.)
Test run
Perform secure wiring. (Refer to page 14.)
Set the motor. (Pr. 71) (Refer to page 187.)
Perform offline auto tuning. (Pr. 96) (Refer to page 189.)
Select a control method
. (Refer to page 92)
As required
⋅ Select online auto tuning. (Pr. 95) (Refer to page 199)
⋅ Easy gain tuning (Refer to page 105)
⋅ Manual input speed control gain adjustment (Refer to page 108)
Set "10" (speed control) or "12" (speed-torque switchover) in Pr. 800 and make
speed control valid.
Select the start command and speed command.
(1) Start command
1) Operation panel: Setting by pressing / of the operation panel
2) External command: Setting by forward rotation and reverse rotation
command (terminal STF or STR)
(2) Speed command
1) Operation panel: Setting by turning of the operation panel
2) External analog command (terminal 2 or 4) :
Give a speed command using the analog signal input to terminal 2 (or
terminal 4).
3) Multi-speed command:
The external signals (RH, RM, RL) may also be used to give speed
command.
Set the motor capacity and the number of motor poles.
(Pr. 80, Pr. 81)
(Refer to page 92.)
Set the operation command. (Refer to page 313)
Set the motor capacity (kW) in Pr. 80 Motor capacity and set the number of
motor poles (number of poles) in Pr. 81 Number of motor poles.
(V/F control is performed when the setting is "9999" (initial value).)
Set "3" (standard motor) or "13" (constant-torque motor) in Pr. 71
Applied motor.