117
4
PARAMETERS
Speed control by Real sensorless vector
control, vector control
4.4.7 Prevent the motor from overrunning (Pr. 285, Pr. 853, Pr. 873)
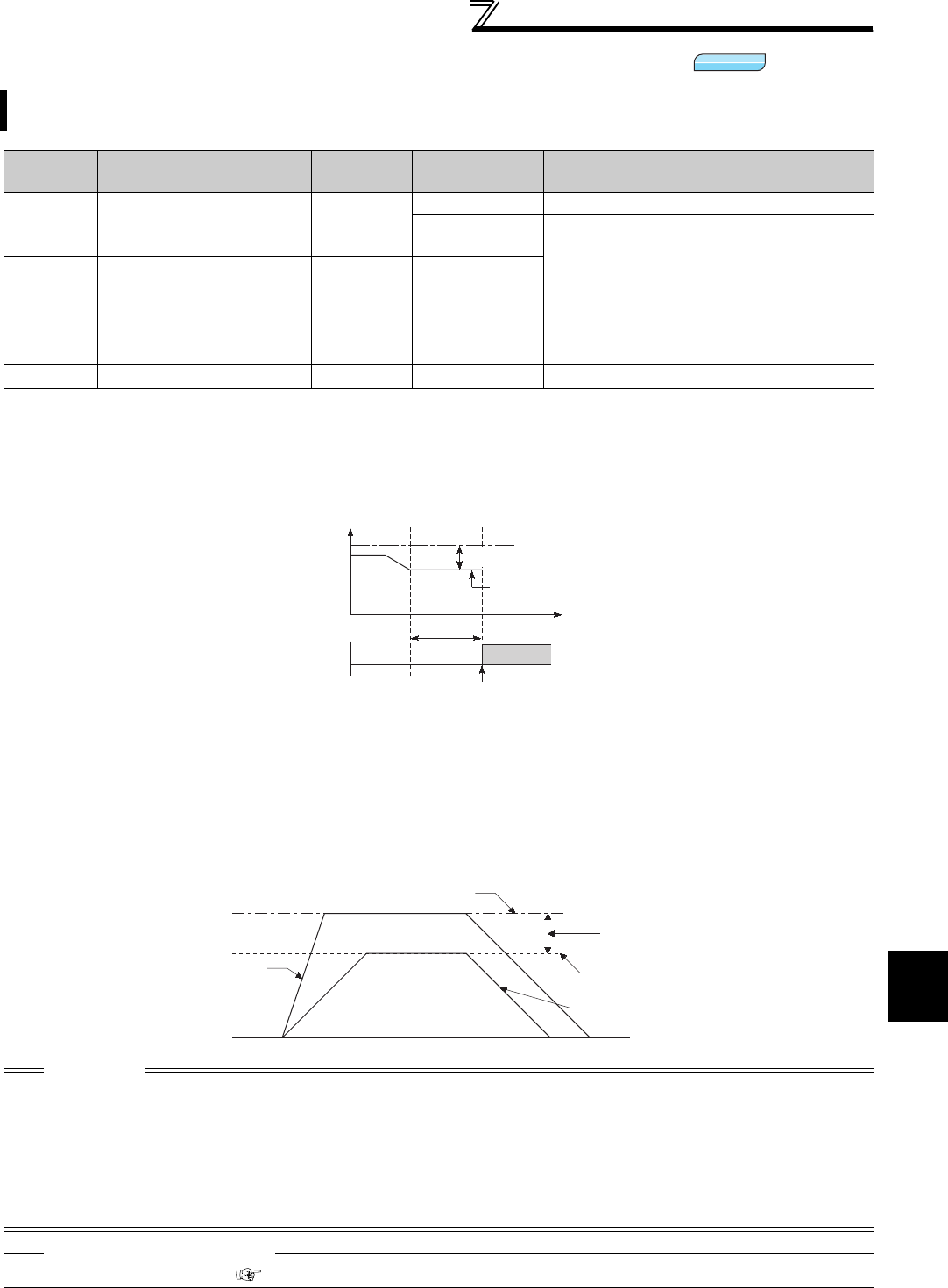
(1) Speed deviation excessive (Pr. 285, Pr. 853)
When the deviation between the set frequency and actual speed is large, e.g. too large load torque, this function can
cause the inverter to provide a speed deviation excessive fault (E.OSD) and come to a trip.
(2) Speed limit (Pr. 873)
This function prevents the motor from overrunning when the setting of number of encoder pulses and the actual
number differ.
When the setting of number of encoder pulses is smaller than the actual number, the motor may increase its speed.
To prevent this, restrict the output frequency with frequency (obtained by adding the set frequency and Pr. 873 ).
This function prevents the motor from overrunning when the load torque is too large and incorrect number of the
encoder is set.
Parameter
Number
Name Initial Value Setting Range Description
285
Excessive speed
deviation detection
frequency
*1
9999
9999 Without speed deviation excessive
0 to 30Hz
If the difference (absolute value) between the
speed command value and actual speed during
speed control under vector control exceeds the
Pr. 285 Excessive speed deviation detection
frequency for more than the time set in Pr. 853
Speed deviation time, speed deviation excessive
occurs and inverter fault (E. OSD) appears,
resulting in a trip.
853 *2 Speed deviation time
1.0s 0 to 100s
873 *2 Speed limit
20Hz 0 to 120Hz
Frequency is limited at the set frequency +
Pr. 873
.
*1 Acts as Overspeed detection frequency under encoder feed back operation. (Refer to page 217)
*2 This parameter can be set when the FR-A7AP/FR-A7AL (option) is mounted.
CAUTION
⋅ If automatic restart after instantaneous power failure (Pr. 57 ≠ 9999) is selected when the setting of number of encoder pulses is
smaller than the actual number, the output speed is limited with the synchronous speed obtained by adding the maximum
setting (Pr. 1) and Pr. 873 setting.
⋅ When speed limit function is activated due to regenerative torque limit, output torque may suddenly decrease. In addition,
output phase loss (E.LF) may occur when speed limit function is activated during pre-excitation.
When the setting of number of encoder pulses are correct, it is recommended to set a maximum value (120Hz) in Pr. 873.
⋅ Even when the set frequency is lowered after the inverter has been started, the speed limit value does not decrease. Note that
the speed is limited to speed command + Pr. 873 setting during deceleration.
Reference parameters
Pr. 285 Overspeed detection frequency Refer to page 217.
Vector
Vector
Set frequency
Actual speed
Time
Speed deviation
excessive fault activated
(E. OSD)
ONOFF
Fault output
(across A-C)
Pr. 853
Pr. 285
Frequency
(Hz)
ctual speed
at error occurrence
Set speed + Pr. 873 value
Value of Pr. 873
Set speed
Speed during
normal operation.












































































































































































































































































































































































































































































































































