


















4
PARAMETERS
95
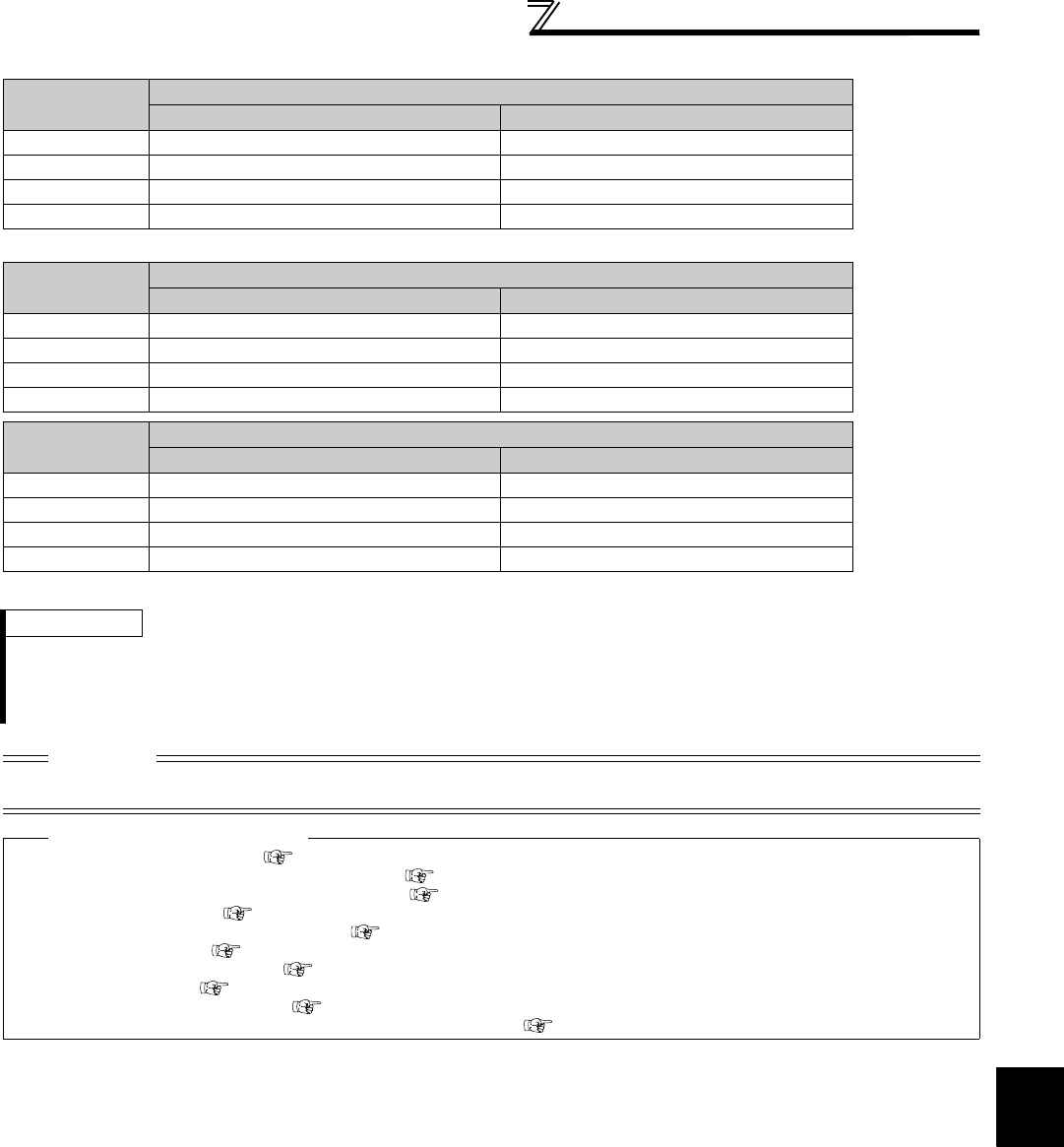
Control mode
Terminal 4 function according to control
* This setting is valid under vector control.
⎯ :No function
Pr. 858 Setting
Real Sensorless Vector Control (Pr. 800 = 12), Vector Control (Pr. 800 = 2)
Speed control (MC signal-OFF) Torque control (MC signal-ON)
0 (initial value) Speed command (AU signal-ON) Speed limit (AU signal-ON)
1 Magnetic flux command * Magnetic flux command *
4 Torque limit (Pr. 810 = 1) ⎯
9999 ⎯⎯
Pr. 858 Setting
Vector Control (Pr. 800 = 4)
Speed control (MC signal-OFF) Position control (MC signal-ON)
0 (initial value) Speed command (AU signal-ON) ⎯
1 Magnetic flux command Magnetic flux command
4 Torque limit (Pr. 810 = 1) Torque limit (Pr. 810 = 1)
9999 ⎯⎯
Pr. 858 Setting
Vector Control (Pr. 800 = 5)
Position control (MC signal-OFF) Torque control (MC signal-ON)
0 (initial value) ⎯ Speed limit (AU signal-ON)
1 Magnetic flux command Magnetic flux command
4 Torque limit (Pr. 810 = 1) ⎯
9999 ⎯⎯
REMARKS
⋅ Switching between speed control and torque control is always enabled independently of whether the motor is at a stop or
running or the DC injection brake operation (pre-excitation).
⋅ During motor operation, speed control/position control switchover and torque control/position control switchover is made when
frequency drops to the Pr. 865 Low speed detection.
CAUTION
⋅ Changing the terminal assignment using Pr. 178 to Pr. 189 (input terminal function selection) may affect the other functions. Set
parameters after confirming the function of each terminal.
♦ Parameters referred to ♦
Advanced magnetic flux vector control Refer to page 148
Real sensorless vector control, vector control (speed control)
Refer to page 96
Real sensorless vector control, vector control (torque control)
Refer to page 119
Vector control (position control)
Refer to page 132
Pr. 178 to Pr. 189 (input terminal function selection) Refer to page 231
Pr. 450 Second applied motor Refer to page 187
Pr. 804 Torque command source selection
Refer to page 125
Pr. 807 Speed limit selection
Refer to page 127
Pr. 810 Torque limit input method selection Refer to page 100
Pr. 858 Terminal 4 function assignment, Pr. 868 Terminal 1 function assignment Refer to page 285