



















214
Motor brake and stop operation
4.14.4 Stop-on contact control function (Pr. 6, Pr. 48, Pr. 270, Pr. 275, Pr. 276)
*1 This parameter allows its setting to be changed during operation in any operation mode even if "0 (initial value) or 1" is set in Pr. 77 Parameter write
selection.
*2 This parameter allows its setting to be changed during operation even if "0" (initial value) is set in Pr. 77 Parameter write selection.
.............Specifications differ according to the date assembled. Refer to page 484 to check the SERIAL number.
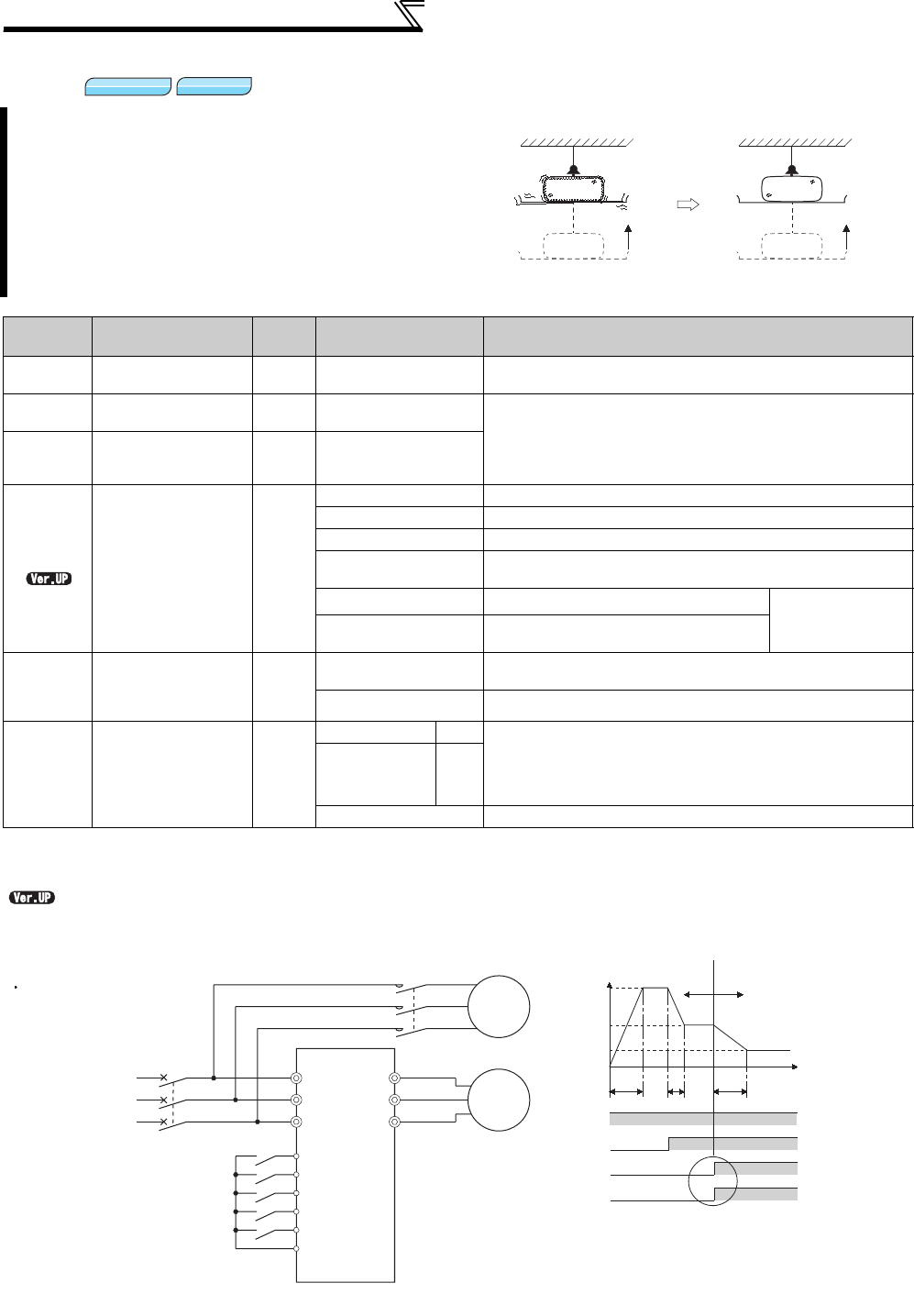
<Connection and operation example>
To ensure accurate positioning at the upper limit etc. of
a lift, stop-on-contact control causes a mechanical
brake to be closed while the motor is developing a
holding torque to keep the load in contact with a
mechanical stopper etc.
This function suppresses vibration which is liable to
occur when the load is stopped upon contact in vertical
motion applications, ensuring steady precise
positioning.
Parameter
Number
Name
Initial
Value
Setting Range Description
6
Multi-speed setting
(low speed)
10Hz 0 to 400Hz Set the output frequency for stop-on-contact control.
22
*1
Stall prevention
operation level
150% 0 to 400%
Set the stall prevention operation level for stop-on-contact
control.
The smaller value set in either Pr. 22 or Pr. 48 has a priority.
48
Second stall
prevention
operation current
150% 0 to 220%
270
Stop-on contact/
load torque high-
speed frequency
control selection
0
0 Normal operation
1 Stop-on-contact control
2 Load torque high speed frequency control (Refer to page 374)
3
Stop-on-contact+load torque high speed frequency control
(Refer to page 374)
11 Stop-on-contact control
E.OLT invalid under
stop-on-contact
control
13
Stop-on-contact+load torque high speed
frequency control (Refer to page 374)
275
*2
Stop-on contact
excitation current
low-speed
multiplying factor
9999
0 to 1000%
Set the force (holding torque) for stop-on-contact control.
Normally set 130% to 180%.
9999 No compensation.
276
PWM carrier
frequency at stop-
on contact
9999
55K or lower 0 to 9 Set a PWM carrier frequency for stop-on-contact control.
For Real sensorless vector control, carrier frequency is
always 2Hz when a setting value is 0 to 5 and always 6Hz
when a setting value is 6 to 9. (Valid at the frequency of 3Hz
or less.)
75K or higher 0 to 4
9999 As set in Pr. 72 PWM frequency selection .
Magnetic flux
Magnetic flux
Magnetic flux
Sensorless
Sensorless
Sensorless
<Without stop-on-contact control>
Vibration Complete stop
Lift Lift
<With stop-on-contact control>
Power
supply
Forward rotation command
High-speed operation command
Middle-speed operation command
Stop-on contact selection 0
Stop-on contact selection 1
MCCB
R/L1
S/L2
T/L3
STF
RH *
RM *
RL *
RT *
U
V
W
MC
Mechanical
brake
Motor
* The input terminal used differs according to the Pr. 180 to Pr. 189 settings.
SD
Sink logic
(a) (b) (c)
Time
Pr. 4
RH
RM
RL
RT
Pr. 5
Pr. 6
Output frequency
0
Normal mode
Stop-on contact
control mode
(a):Acceleration time (Pr. 7 )
(b):Deceleration time (Pr. 8 )
(c):Second deceleration time (Pr. 44/Pr. 45 )
*
ONOFF
ONOFF
ONOFF
ON
Goes into stop-on-contact control mode when
both RL and RT switch on.
*RL and RT may be switched on in any order
with any time difference