



















225
Motor brake and stop operation
4
PARAMETERS
(6) Orientation operation (under V/F control, Advanced magnetic flux vector control)
Orientation during running
1) When the orientation command (X22) is input, the motor speed decreases to the orientation speed set in Pr. 351
Orientation speed . (Pr. 351 initial value: 2Hz)
2) After the speed reaches the orientation speed, the speed decreases to the creep speed set in Pr. 352 Creep speed
as soon as the current position pulse reaches the creep switchover position set in Pr. 353 Creep switchover position
(Pr. 352 initial value:0.5Hz, Pr. 353 initial value: 511)
3) Moreover, as soon as the current position pulse reaches the set position loop switchover position in Pr. 354 Position
loop switchover position , control is changed to position loop. (Pr. 354 initial value: 96)
4) After switching to position loop, the inverter decelerates and stops with DC injection brake as soon as the current
position pulse has reached the DC injection brake start position set in Pr. 355 DC injection brake start position. (Pr. 355
initial value: 5)
5) When the position pulse has stopped within the in-position zone set in Pr. 357 Orientation in-position zone , the
orientation complete signal (ORA) is output after the completion signal output delay time set in Pr. 363 Completion
signal output delay time has elapsed. If the motor does not stop within the in-position zone due to external force, etc.,
the orientation complete signal is turned OFF after the time set in Pr. 363 Completion signal output delay time has
elapsed. (Pr. 357 initial value: 5)
6) If the orientation is not completed continuously for the time set in Pr. 365 Orientation limit after passing the creep
switchover position, the orientation fault signal (ORM) is output.
7) When the motor stops before the position pulse reaching the in-position zone due to external force after orientation
start and orientation complete signal (ORA) is not output, orientation fault signal (ORM) is output after the time set in
encoder stop check time set in Pr. 364 Encoder stop check time has elapsed. Moreover, the orientation complete signal
(ORA) is turned OFF after the time set in Pr. 363 Completion signal output delay time has elapsed if the position pulse
is outside the in-position zone due to external force, etc. after outputting the orientation complete signal (ORA), and
the orientation fault signal (ORM) is output if the orientation has not completed within the time set in Pr. 364 Encoder
stop check time .
8) When the start signal (STF or STR) is turned OFF with the orientation command ON after outputting the orientation
complete signal (ORA) and orientation fault signal (ORM), the orientation complete signal (ORM) or orientation fault
signal (ORM) is output again after recheck time set in Pr. 366 Recheck time has elapsed.
9) The orientation complete signal (ORA) and orientation fault signal (ORM) are not output when the orientation
command is OFF.
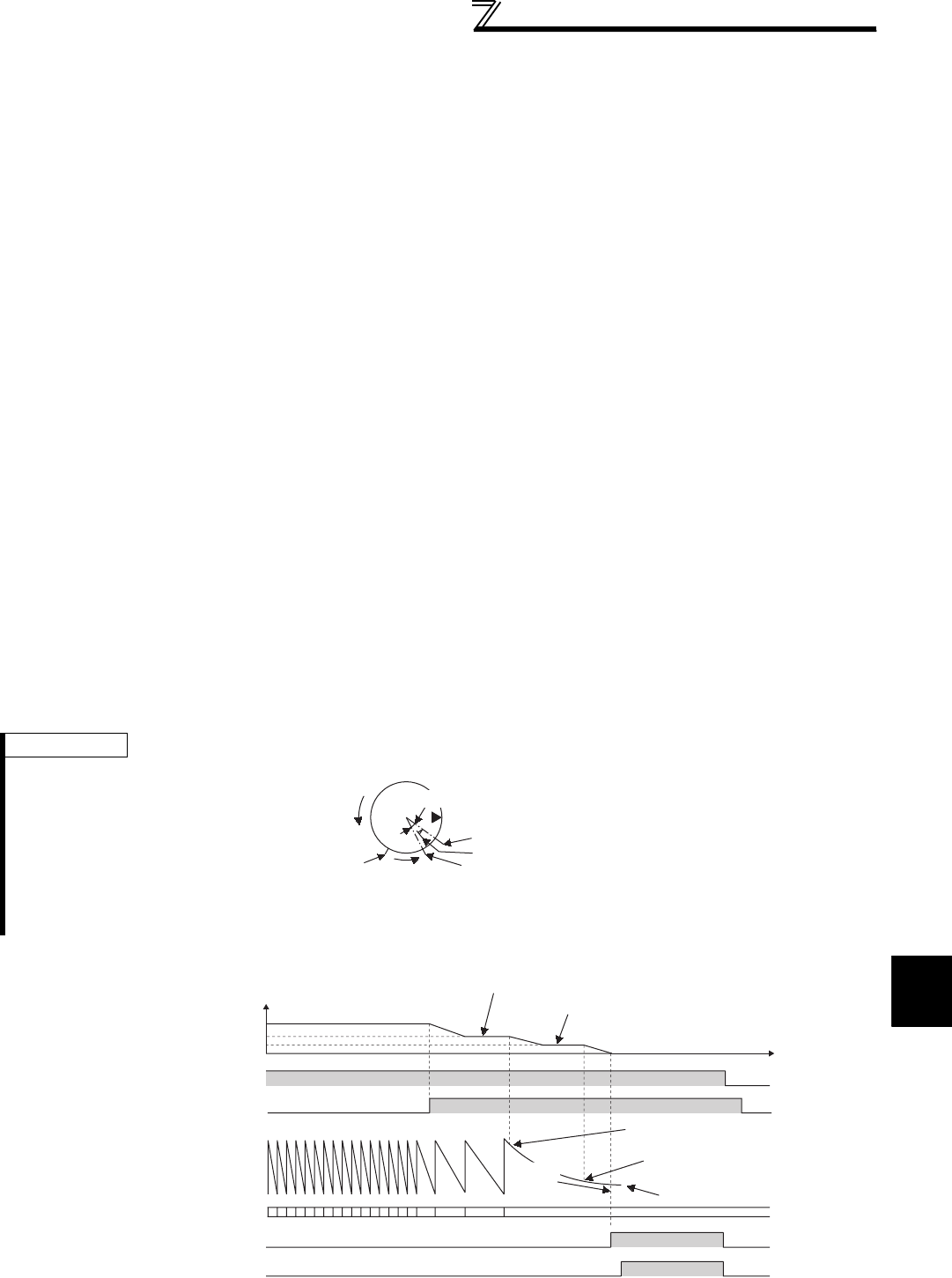
• Action time chart
REMARKS
• When the orientation command is OFF with the start signal ON, the speed accelerates to the command speed.
• If the hunting of the motor shaft occurs, set a larger value in Pr. 354 Position loop switchover position or a smaller value in Pr. 352
Creep speed to prevent it.
Orientation stop position command
DC injection brake
Position loop switchover position
Creep switchover position
Orientation
speed
Origin
Creep
speed
Position loop
Main spindle speed (encoder)
Pr. 351
Pr. 352
Start signal (STF, STR)
Orientation command (X22)
Current position signal
Origin signal
Orientation speed (set with Pr. 351 )
Creep speed (set with Pr. 352 )
Creep switchover position
(set with Pr. 353)
Position loop switchover
(set with Pr. 354 )
DC injection
brake start
position
(set with Pr. 355 )
Stop position command
0
DC injection brake
OFF OFF
ON
Orientation complete signal (ORA)
OFF OFF
ON
OFF
OFF
Time
ON
OFF
ON
1)
2)
3)
4)
5)