



















132
Position control by vector control
4.6 Position control by vector control
4.6.1 Position control
(1) Setting procedure
Purpose Parameter that must be Set Refer to Page
Simple position control by
parameter setting
Position command by
parameter
Pr. 419, Pr. 464 to Pr. 494
134
Position control by pulse train input
of the inverter
Position command by
simple pulse train
Pr. 419, Pr. 428 to Pr. 430
137
Adjust the gear ratio of motor and
machine
Setting the electronic
gear
Pr. 420, Pr. 421, Pr. 424
139
Setting of positioning adjustment
parameter
In-position width
Excessive level error
Pr. 426, Pr. 427
140
Improve position control accuracy
Gain adjustment of
position control
Pr. 422, Pr. 423, Pr. 425
141
In the position control, the speed command is calculated so that the difference between command pulse (or
parameter setting) and the number of feedback pulses from the encoder is zero in order to run the motor.
This inverter can perform simple position feed by contact input, position control by inverter simple pulse input,
and position control by FR-A7AL pulse train input.
CAUTION
⋅ The carrier frequencies are selectable from among 2k, 6k, 10k, 14kHz for vector control.
(2k and 6kHz for the 75K or higher)
Vector
Vector
Vector
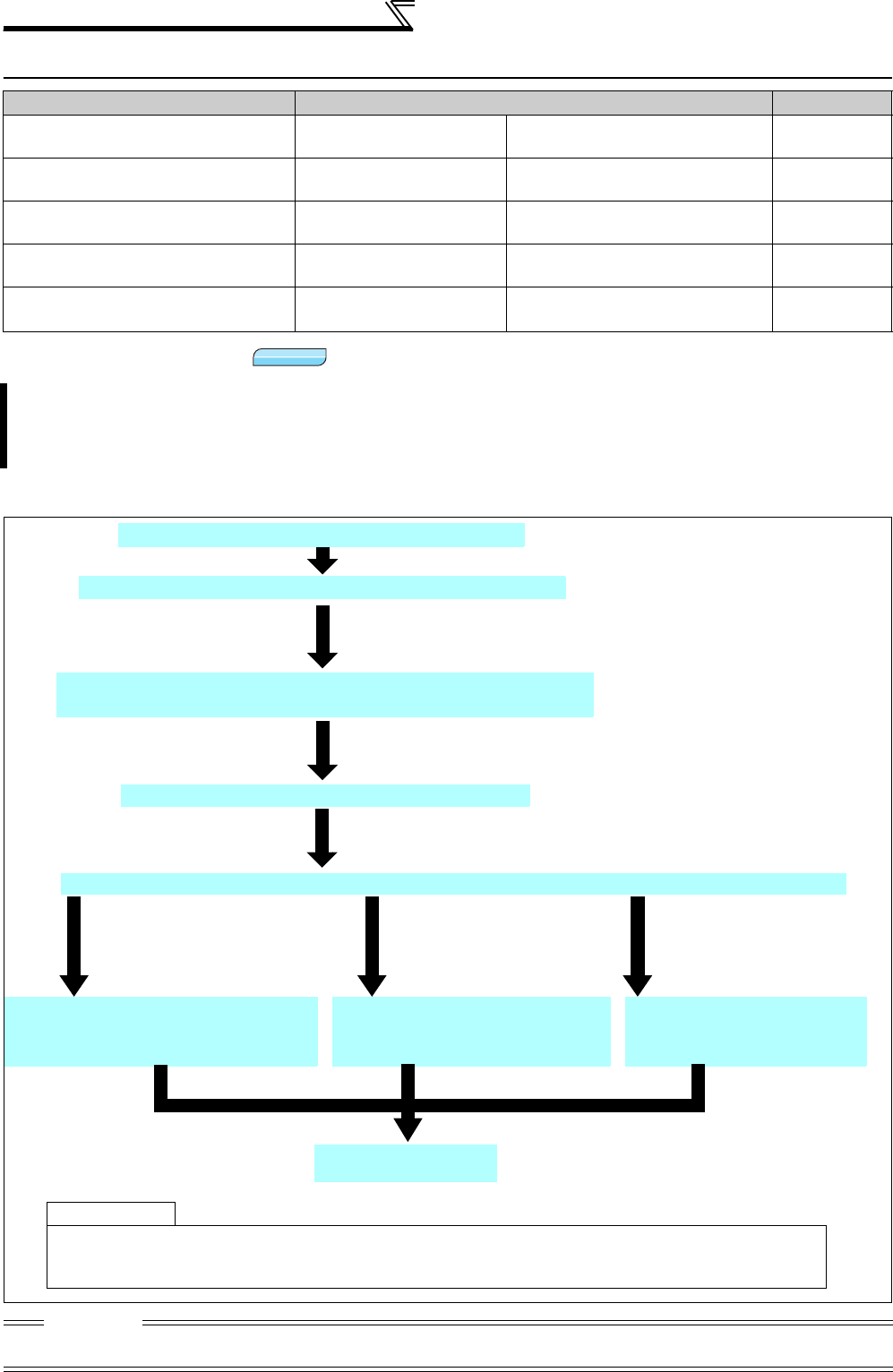
Perform secure wiring. (Refer to page 37.)
Set the motor and encoder. (Pr. 71, Pr. 359, Pr. 369)
As required
· Set the electronic gear. (Refer to page 139)
· Setting of positioning adjustment parameter (refer to page 140)
· Gain adjustment of position control (refer to page 141)
Set the motor capacity and the number of motor poles.
(Pr. 80, Pr. 81) (Refer to page
92.)
Set the motor capacity (kW) in
Pr. 80
Motor capacity
and set the number
of motor poles (number of poles) in
Pr. 81
Number of motor poles
. (V/F
control is performed when the setting is "9999" (initial value).)
Mount the FR-A7AP/FR-A7AL (option).
Set
Pr. 71 Applied motor
,
Pr. 359 Encoder rotation direction
and
Pr. 369
Number of encoder pulses
according to the motor and encoder used.
(Refer to page 38.)
Select a control method. (Refer to page
92
.)
Make speed control valid by selecting "3" (position control) "4" (speed-
position switchover) or "5" (position-torque switchover) for
Pr. 800
.
Refer to the Instruction Manual of
FR-A7AL.
Selection of position command source. (Pr. 419)
Setting of parameter for position feed
(Pr. 465 to Pr. 494).
(Refer to page 134.)
Selection of command pulse form
(Pr. 428).
(Refer to page 137.)
Position command by contact
input
Set "0" (initial value) in Pr. 419.
Position command by
inverter pulse train input
Set "2" in Pr. 419.
Position command from the
positioning module of the
programmable controller
system (through FR-A7AL)
Set Pr. 419 = "1"
Test run