



















Route monitoring · 259
How to monitor route
You can monitor the route from the ECDIS screen. There are two boxes in the upper information area.
Below an example with
additional textual information
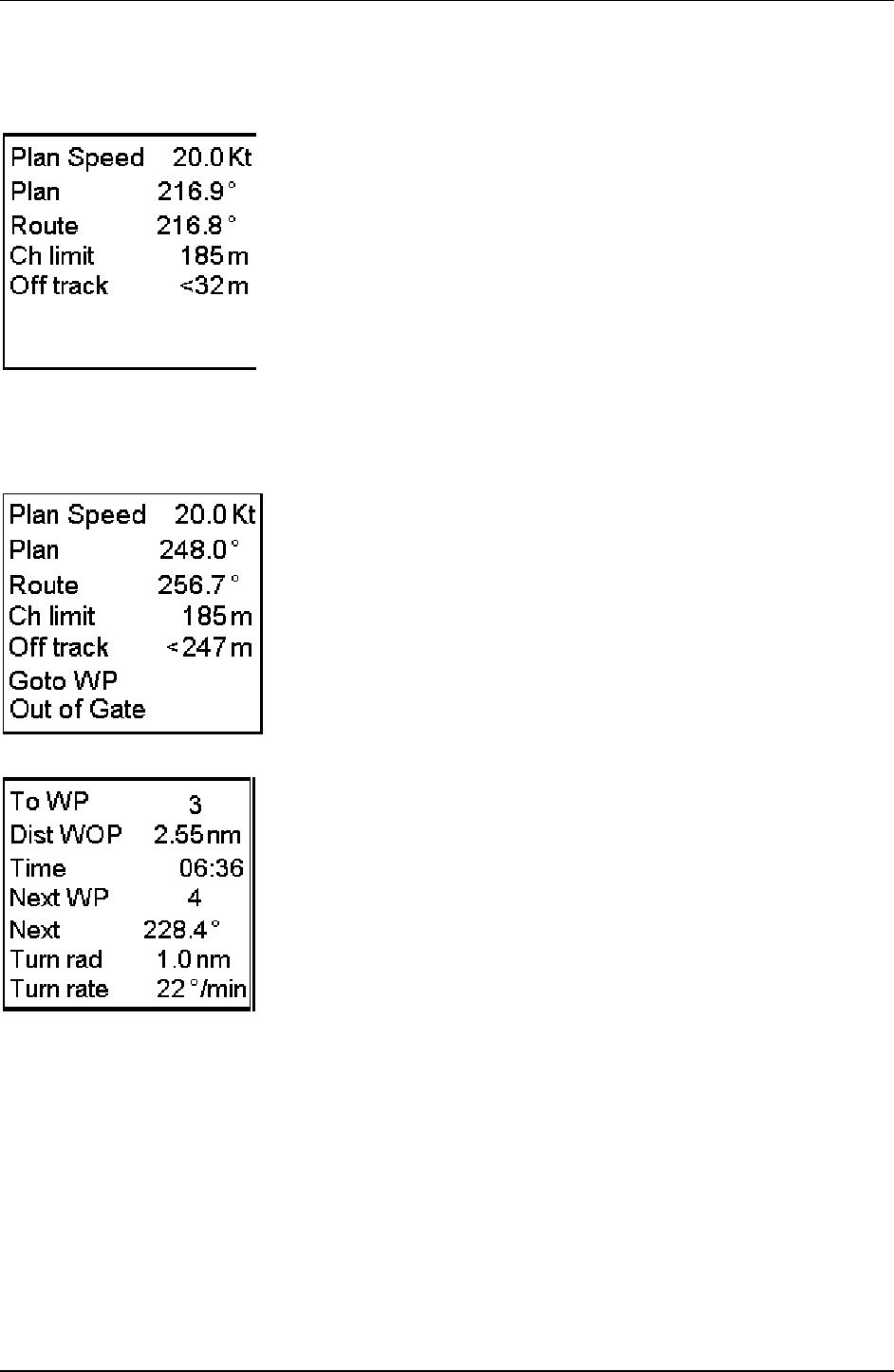
Left window
· Plan Speed; planned speed to approach "To WP".
· Plan; planned course between previous and "To WP". NOTE; if gyro value
is compensated and Gyro error correction and Gyro error compensation
have been enabled in Navigation Parameters then text (corr) in red colour
with Plan is displayed.
· Route; calculated set course to follow the Monitored route including off
track, drift and gyro error compensation.
· Ch limit; planned width of channel to approach "To WP".
· Off track; perpendicular distance of the ship from the track.
Additional textual information is available if any of following steering mode is in
use:
· "Goto WP", "GotoWP Great circle", "Ass. Turn enabled" and "Assisted
turn" in Goto Waypoint mode
· "Goto Track", "Track Great circle", "Track Turn" in Go Track mode
Permanent alarms are available regardless of the used steering mode:
· "Outside channel" is indicated by red colour of the "Off track" value and by
orange text
· "Out of gate" is indicated by orange text. Out of gate indicates that, if the
vessel continues using the current course, then the vessel will be outside of
the channel at wheel over point.
Right window
· To WP; the waypoint which the ship is approaching.
· Dist WOP; distance to the point where rudder order for course change at
"To WP" will be given.
· Time; time left to WOP (dd:hh:mm:ss).
· Next WP; the wp following the "To WP".
· Next, planned course to steer after "To WP". NOTE; if gyro value is
compensated and Gyro error correction and Gyro error compensation
have been enabled in Navigation Parameters then text (corr) in red colour
with Next is displayed.
· Turn rad; planned turning radius at "To WP".
· Turn rate; calculated rate of turn which bases on current speed and planned
turning radius.