



















332 · Navigation Sensors
Note: If you have a dual axis Doppler log, which can measure both water and bottom track, then installation
parameters could be set to receive water track as log device.
Dual log (water):
If selected, sensor is used as speed and course source. (water) is used to indicate that this information is from water
track of dual log.
Dual log (bottom):
If selected, sensor is used as speed and course source. (bottom) is used to indicate that this information is from
bottom track of dual log.
ARPA:
If selected, sensor is used as speed and course source. Radar might tell its source of speed and course. Following
alternatives are available: (bottom) if source is a log operating in bottom track, (water) if source is a log operating
in water track, (posit.) if source is a position receiver such as GPS, (manual) if source is a manual entry, (reftgt) if
source is a tracked target.
Manual heading:
If selected, user can enter Heading.
Note: This is used only if there are no other Course sensors selected.
Gyro1:
If selected, sensor is used as heading source. (mag) is used to indicate value from a magnetic heading source. True
heading source has no indication. If the source of Gyro1 is a gyro with synchro or stepper interface, then indication
(require set) is used highlight that you need to set a new initial value for the gyro.
Gyro2:
If selected, sensor is used as heading source. (mag) is used to indicate value from a magnetic heading source. True
heading source has no indication.
If you have both gyro1 and gyro2 selected and if they value differs more than 5° then system generates alarm "2004
Gyro data unreliable".
Rate gyro:
Sensor is used as Rate of Turn source. (calc.) is used to indicated Rate of Turn calculated from Gyro movement.
Note: This release of program always selects Rate gyro.
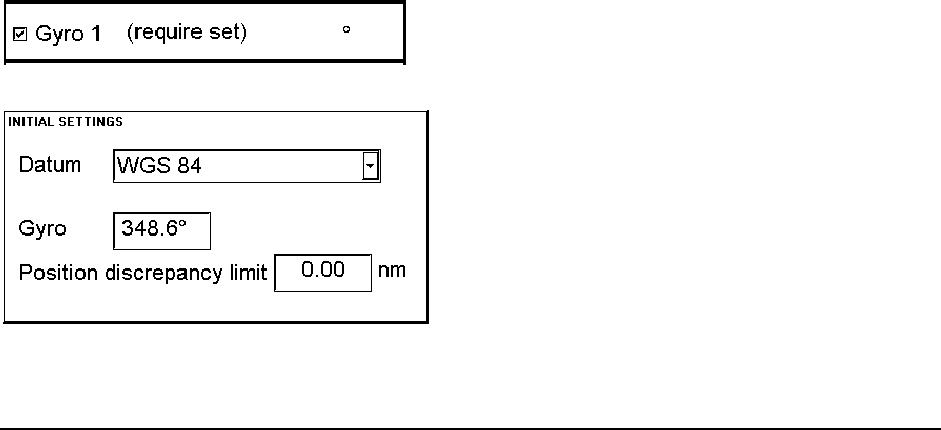
How to set initial value of a Gyro1
Gyro1 could be interfaced based on serial data and thus you don't need to set the initial gyro value. However it is
very common that your Gyro1 is interfaced based on synchro or stepper interface. Then you need to set the initial
value of the Gyro1. If your Gyro1 requires initial value, then there is an indication (require set); see below.
To set initial value use Initial Settings; see below.