



















ECDIS Screen · 33
Information Area
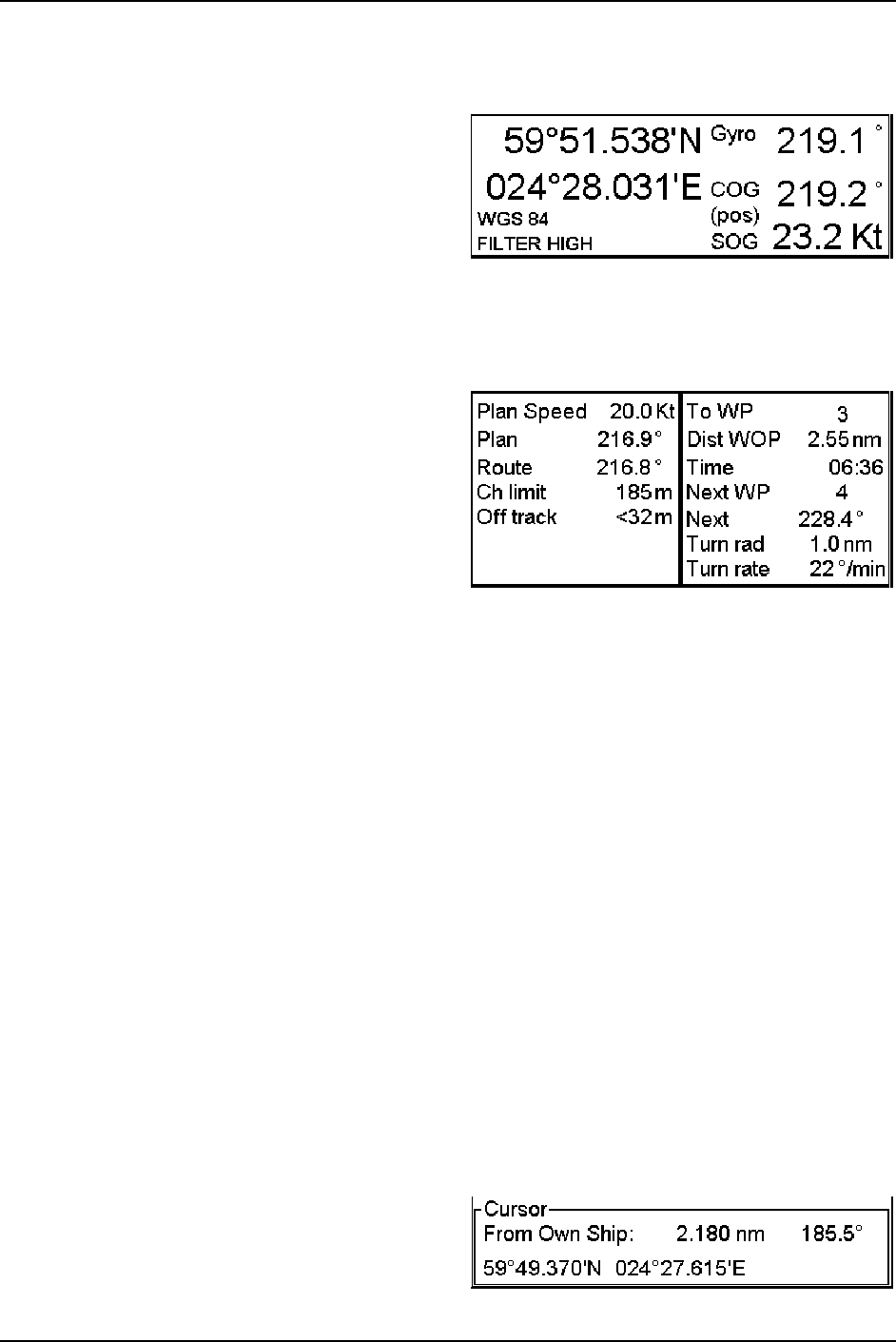
In Information area where is permanently displayed information about the position of own ship and the route
monitoring (upper part of the area) and information of cursor's location on the chart (lower part of area).
Information from the positioning sensors:
· Latitude and Longitude
· GYRO readings and source of it if it is not real gyro
· COG (Course over ground) and source of it
· SOG (Speed over ground)
· Positioning source, which can be: Dead Reckoning,
GPS, DGPS, LORAN, FILTER etc.
· Datum in use, which is shown above positioning
source. (WGS 72, WGS 84, European 1950 etc.)
Information from Route monitoring:
· Plan Speed; planned speed to approach "To WP".
· Plan; planned course between previous and "To WP".
· Route; calculated set course to follow the Monitored
route including off track, drift and gyro error
compensation.
· Ch limit; planned width of channel to approach "To
WP".
· Off track; perpendicular distance of the ship from the
track.
· To WP; the waypoint which the ship is approaching.
· Dist WOP; distance to the point where rudder order
for course change at "To WP" will be given.
· Time; time left to WOP (dd:hh:mm:ss).
· Next WP; the wp following the "To WP".
· Next; planned course between "To WP" and "Next
WP"
· Turn rad; planned turning radius at "To WP".
· Turn rate; calculated rate of turn which bases on
current speed and planned turning radius.
Information, which has calculated from data of positioning
sensors and from data of Route monitoring by the system:
· Route
· Off track
· Dist WOP
· Time
· Next
Additional textual information is available if any of
following steering mode is in use:
· "Goto WP", "GotoWP Great circle", "Ass. Turn
enabled" and "Assisted turn" in Goto Waypoint
mode
· "Goto Track", "Track Great circle", "Track Turn"
in Go Track mode
Permanent alarms are available regardless of the used
steering mode:
· "Outside channel" is indicated by red colour of the
"Off track" value and by orange text
· "Out of gate" is indicated by orange text. Out of
gate indicates that, if the vessel continues using the
current course, then the vessel will be outside of
the channel at wheel over point.
Position of cursor, co-ordinates displayed in selected
Datum.
Range and bearing from own ship position.