



















340 · Navigation Sensors
Manual
SPEED
LOG
(Water track of
dual axis doppler
log OR Pilot log)
RADAR
(measures
water speed)
SOG, if available
from any of
selected position
receiver
Alarm 2001
No Speed
Available
Speed
used by
the system
(Water
Speed)
Selected
Selected and value exist
Available
Selected and value exist
Not selected
Not selected
or no value
Not selected
or no value
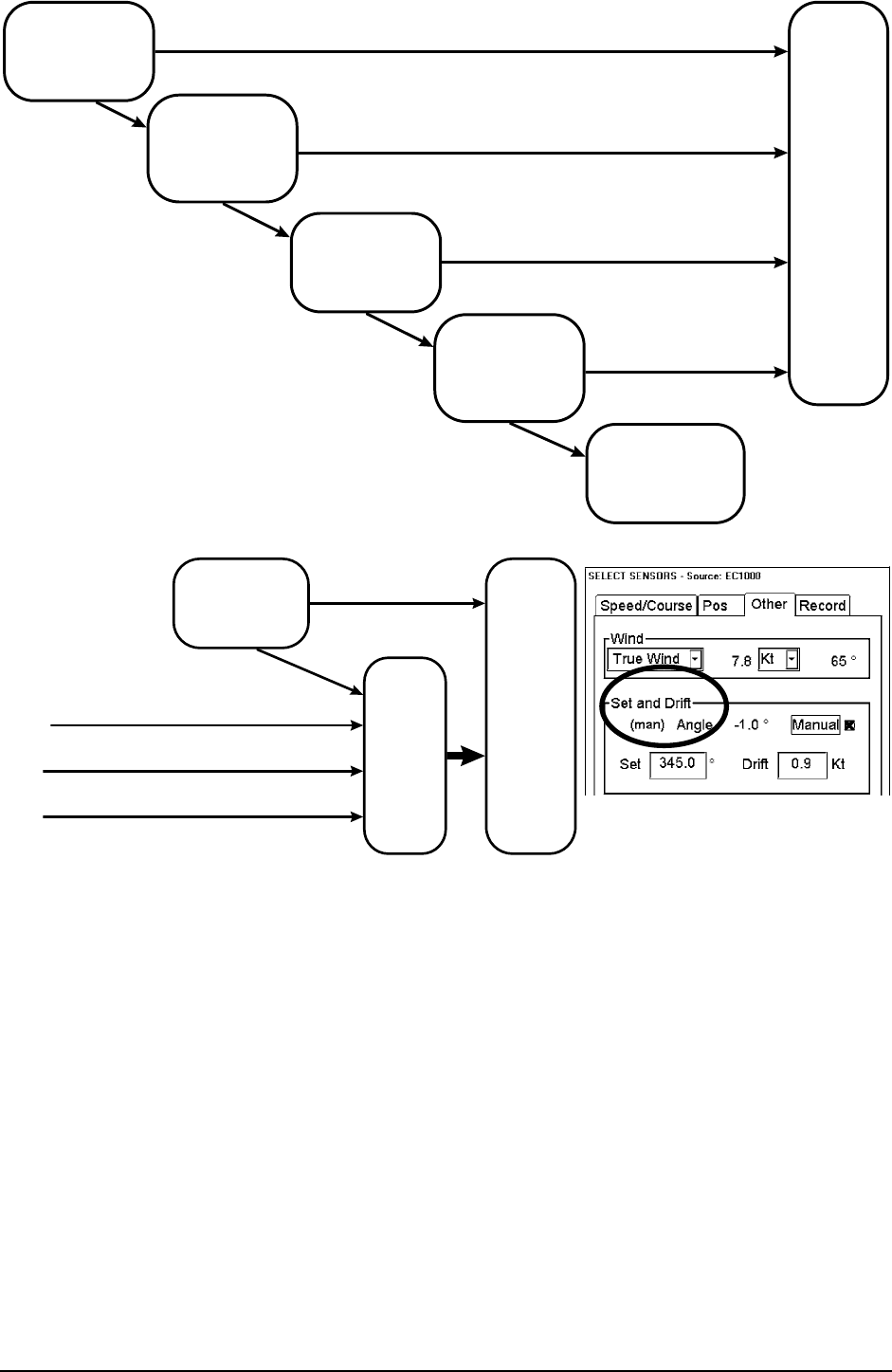
Not available
The figure above shows the source of water speed used for drift calculation.
Manual
DRIFT
Drift
used by
the system
Selected
SOG/COG used by the system
Heading used by the system
Speed (water speed) used by the system
Not selected
Calculator
Drift used by the System is shown SENSOR Other Sheet. In this case it is from manual drift. Following alternatives
are available: (log) if value is based on log or dual axis log; (posit) if value is based on position sensor; (filter) if
value based on Kalman Filter; (man) if value is based on manual entry.
Alarm related to SOG, COG, speed, heading, rot, drift and docking
speed components
It is possible that user has not selected any speed or heading sensors, or that the selected sensors doesn't have any
valid values. This kind of a situation is critical for the system, because it cannot perform even dead reckoning.
When no speed source is available the system generates alarm "2001 No speed available". When no heading source
is available the system generates alarm " 2002 No heading available".
It is possible that system finds out that SOG and/or COG from the sensors are scattered, then an alarm "2013
SOG&COG unreliable" is generated. Note that source of SOG and COG is not only Speed and Course sensors,
but the source can also be position equipment. For more information about priority of source of SOG/COG, see
chapter "Source of SOG, COG, speed, heading, rot, drift and docking speed components" on page 338.
Verify and select valid sensors in Speed/Course and Pos pages of Sensor window for SOG&COG used by the
system.