



















352 · Navigation Sensors
Use Reference targets for automatic Gyro error correction
Gyro error correction can be calculated in real-time using Reference Target function of the system.
The file containing Reference Targets must have at least 8 Reference Targets inserted. The ARPA radar must find
simultaneously at least 2 reliable tracked Reference Targets before the position and gyro error can be calculated.
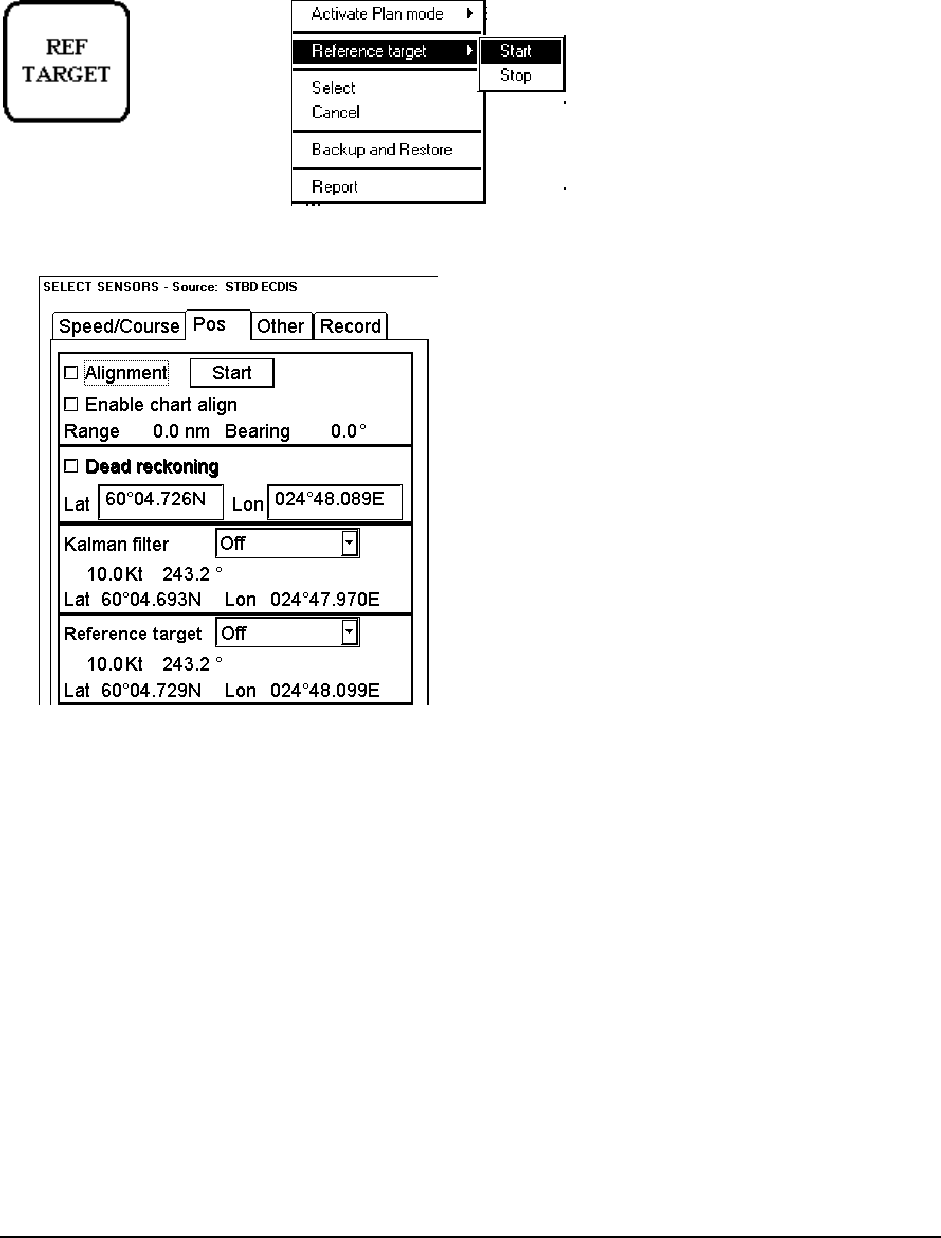
When you start Reference target positioning, Reference target field appears to Sensors Position sheet.
1. Start Reference target positioning.
Use this button to open
Reference target menu
2. Press Sensors button and open Position sheet.
3. Select Reference target as source of positioning. For more information, see "Source of position" on page 336.
4. When you have in Position sheet Reference target field, which shows speed, position and course values, the
system has been able to calculate also a value for Gyro error compensation.
NOTE! The system use gyro error from reference targets, if you have selected Gyro error correction in Auto
position and Gyro spd/lat error in Off position. Reference Target based gyro error correction doesn't require that
you also use Reference Targets as position finding method. This feature is very useful when you operate with high
accuracy position sensors such as DGPS because both your position is still based on high accurate DGPS and the
system can automatically correct the gyro error for you.
Gyro correction related alarms:
"2352 RefTgt: Lost gyro corr", you have selected Reference Targets as gyro correction source and the Reference
target system is unable to solve gyro correction.
"2352 RefTgt: Tracking full", if you try to start reference targets and there are less than 8 tracking channels
available.