



















324 · Common Reference System
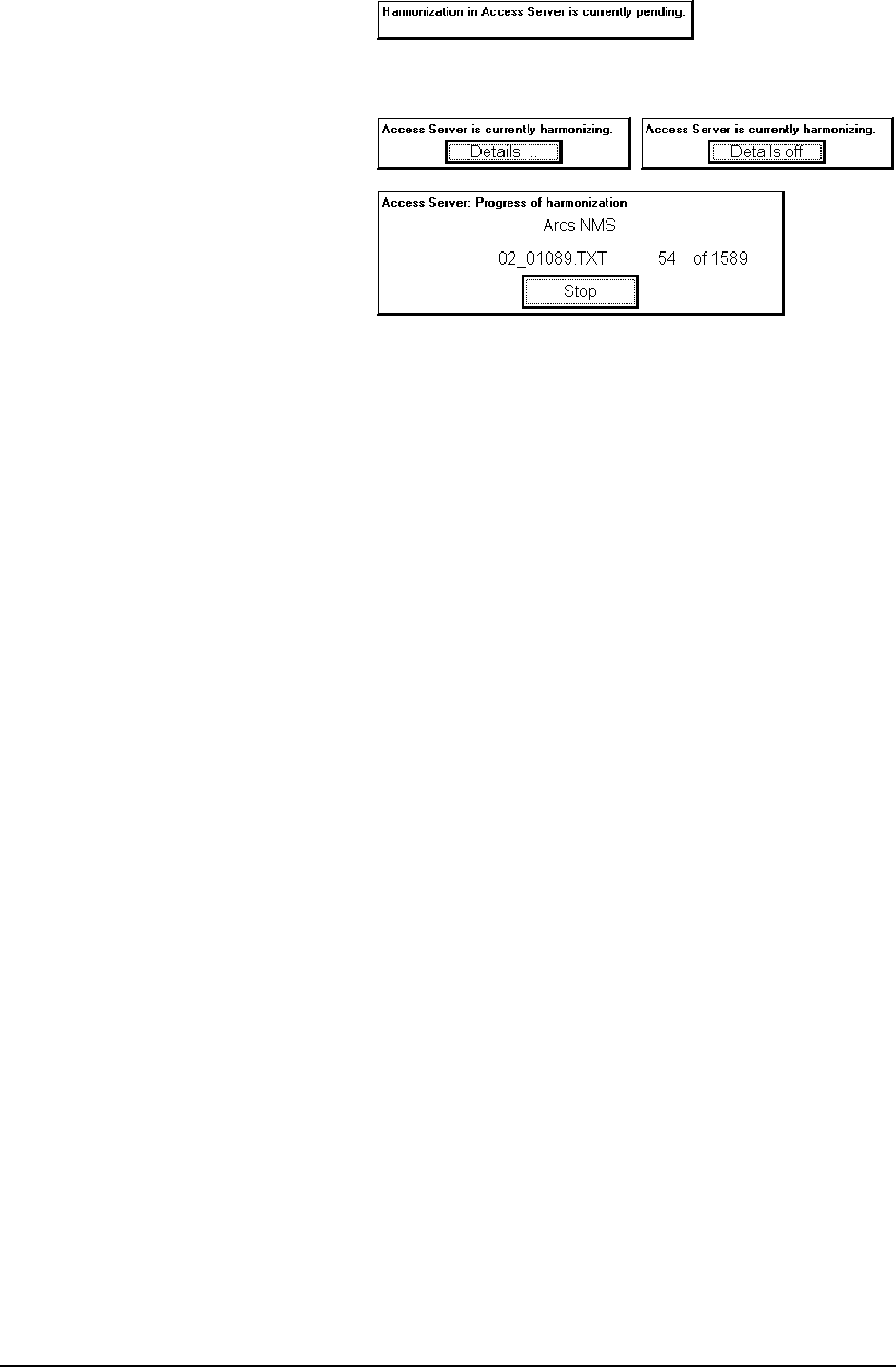
If the System recognise that any data
mentioned above has been changed in one
Workstation, Access Server indicates the need
for pending harmonisation using the window
beside.
When the Access Server recognises that the
editing, loading, updating etc. session has
been completed in one Workstation, the
Access Server starts harmonising databases in
order to get databases identical on all
Workstations. Access Server is currently
harmonizing window appears to indicating
this action. If you press Details… button, A
Progress of harmonization window appears
to give detailed information about
harmonization. This window can be closed by
pressing Details off button in Access Server
is currently harmonizing window.
NOTE: The Stop button in Progress of
harmonization window is intended to stop
the harmonization in case of system
malfunction (for example the harmonization
newer end etc.).
When Route, User Chart, Reference Target or Pilot Data is selected for Planning mode, the Access Server locks it
and rejects further selection of it in another Workstations until "Enable changes" selection is removed or Planning
window is closed.
Harmonising starts when "Enable Changes" selection is removed or corresponding window(s) are closed. After
harmonisation has been done, the Route, User Chart, Reference Target or Pilot Data can be selected in another
Workstation for Planning mode.
Shared User selections
Common reference system concept include that some selections and settings made by User in one Workstation are
transferred to other Workstation(s). These things are listed below:
· Route, User Chart, Reference Target and Pilot Data in Monitor mode
· Selected sensors in Spd/Course and Position pages of Sensor (including position alignment of own ship and gyro
correction)
· Settings for Chart Alarms and Watch Sector
· Settings of conditions for Voyage and Dangerous Targets recordings
· Ship parameters (table of Forwarding distance, Optimization parameters and Navigation Parameters)
· Setting for Position discrepancy limit